 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElastically-Constrained Meta-Learner for Federated Learning
Jun 30, 2023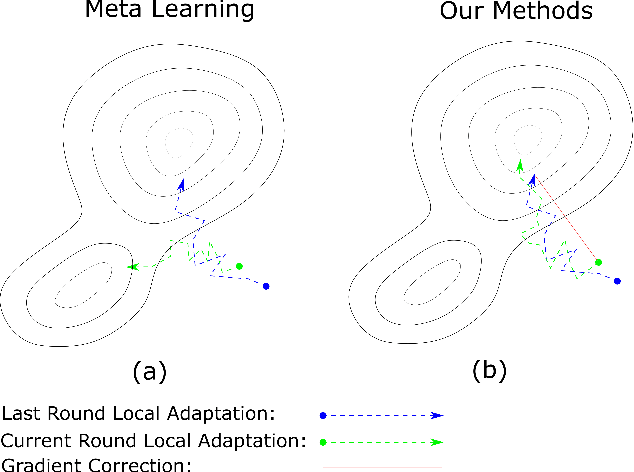
Federated learning is an approach to collaboratively training machine learning models for multiple parties that prohibit data sharing. One of the challenges in federated learning is non-IID data between clients, as a single model can not fit the data distribution for all clients. Meta-learning, such as Per-FedAvg, is introduced to cope with the challenge. Meta-learning learns shared initial parameters for all clients. Each client employs gradient descent to adapt the initialization to local data distributions quickly to realize model personalization. However, due to non-convex loss function and randomness of sampling update, meta-learning approaches have unstable goals in local adaptation for the same client. This fluctuation in different adaptation directions hinders the convergence in meta-learning. To overcome this challenge, we use the historical local adapted model to restrict the direction of the inner loop and propose an elastic-constrained method. As a result, the current round inner loop keeps historical goals and adapts to better solutions. Experiments show our method boosts meta-learning convergence and improves personalization without additional calculation and communication. Our method achieved SOTA on all metrics in three public datasets.
Towards Comprehensive Testing on the Robustness of Cooperative Multi-agent Reinforcement Learning
Apr 17, 2022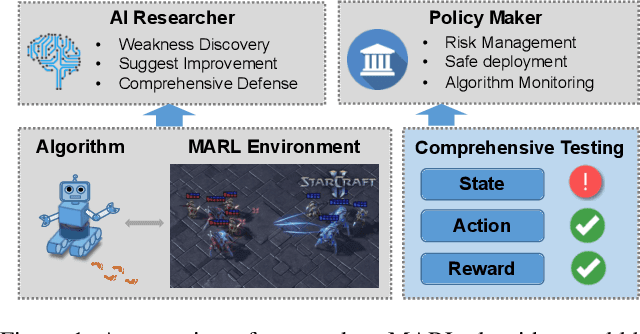
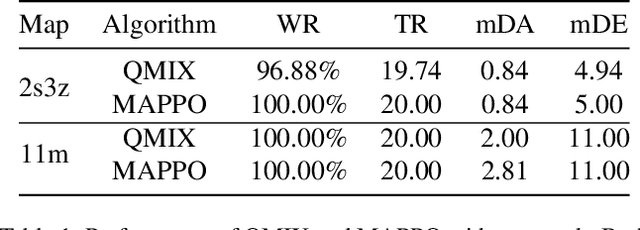
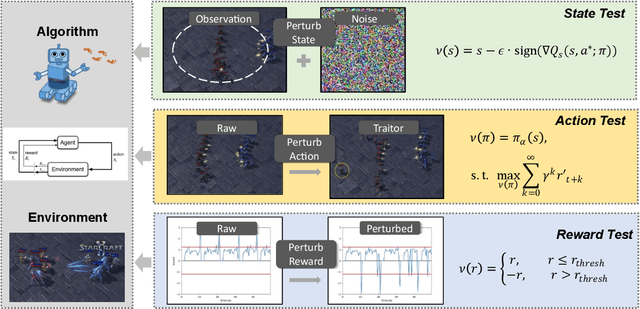
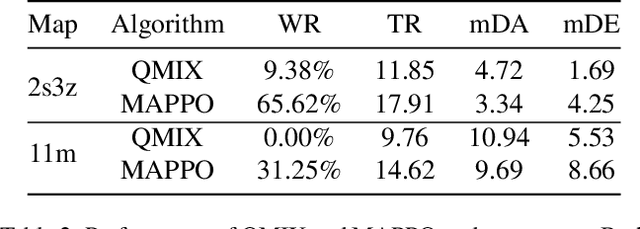
While deep neural networks (DNNs) have strengthened the performance of cooperative multi-agent reinforcement learning (c-MARL), the agent policy can be easily perturbed by adversarial examples. Considering the safety critical applications of c-MARL, such as traffic management, power management and unmanned aerial vehicle control, it is crucial to test the robustness of c-MARL algorithm before it was deployed in reality. Existing adversarial attacks for MARL could be used for testing, but is limited to one robustness aspects (e.g., reward, state, action), while c-MARL model could be attacked from any aspect. To overcome the challenge, we propose MARLSafe, the first robustness testing framework for c-MARL algorithms. First, motivated by Markov Decision Process (MDP), MARLSafe consider the robustness of c-MARL algorithms comprehensively from three aspects, namely state robustness, action robustness and reward robustness. Any c-MARL algorithm must simultaneously satisfy these robustness aspects to be considered secure. Second, due to the scarceness of c-MARL attack, we propose c-MARL attacks as robustness testing algorithms from multiple aspects. Experiments on \textit{SMAC} environment reveals that many state-of-the-art c-MARL algorithms are of low robustness in all aspect, pointing out the urgent need to test and enhance robustness of c-MARL algorithms.
SDOD:Real-time Segmenting and Detecting 3D Objects by Depth
Jan 26, 2020
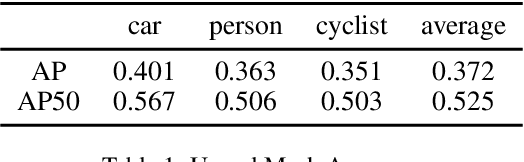
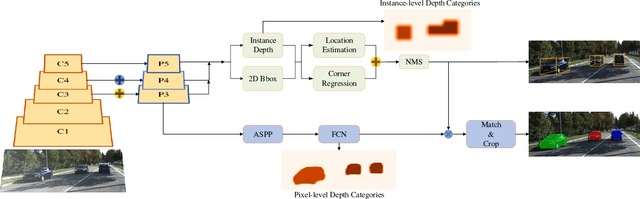
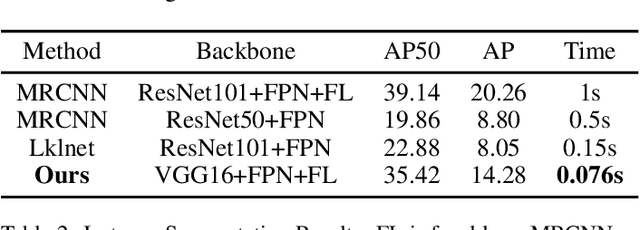
Most existing instance segmentation methods only focus on 2D objects and are not suitable for 3D scenes such as autonomous driving. In this paper, we propose a model that splits instance segmentation and object detection into two parallel branches. We discretize the objects depth into "depth categories" (background set to 0, objects set to [1, K]), then the instance segmentation task has been transformed into a pixel-level classification task. Mask branch predicts pixel-level "depth categories", 3D branch predicts instance-level "depth categories", we produce instance mask by assigning pixels which have same "depth categories" to each instance. In addition, in order to solve the problem of imbalanced between mask labels and 3D labels in the KITTI dataset (200 for mask, 7481 for 3D), we use unreal mask generated by other instance segmentation method to train mask branch. Despite the use of unreal mask labels, experiments result on KITTI dataset still achieves state-of-the-art performance in vehicle instance segmentation.