 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCaSPR: Learning Canonical Spatiotemporal Point Cloud Representations
Aug 06, 2020



We propose CaSPR, a method to learn object-centric canonical spatiotemporal point cloud representations of dynamically moving or evolving objects. Our goal is to enable information aggregation over time and the interrogation of object state at any spatiotemporal neighborhood in the past, observed or not. Different from previous work, CaSPR learns representations that support spacetime continuity, are robust to variable and irregularly spacetime-sampled point clouds, and generalize to unseen object instances. Our approach divides the problem into two subtasks. First, we explicitly encode time by mapping an input point cloud sequence to a spatiotemporally-canonicalized object space. We then leverage this canonicalization to learn a spatiotemporal latent representation using neural ordinary differential equations and a generative model of dynamically evolving shapes using continuous normalizing flows. We demonstrate the effectiveness of our method on several applications including shape reconstruction, camera pose estimation, continuous spatiotemporal sequence reconstruction, and correspondence estimation from irregularly or intermittently sampled observations.
Quaternion Equivariant Capsule Networks for 3D Point Clouds
Dec 27, 2019

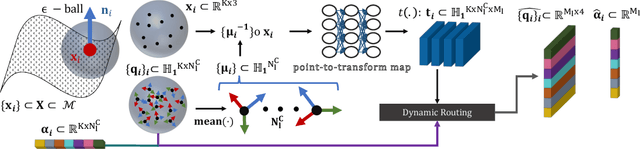

We present a 3D capsule architecture for processing of point clouds that is equivariant with respect to the $SO(3)$ rotation group, translation and permutation of the unordered input sets. The network operates on a sparse set of local reference frames, computed from an input point cloud and establishes end-to-end equivariance through a novel 3D quaternion group capsule layer, including an equivariant dynamic routing procedure. The capsule layer enables us to disentangle geometry from pose, paving the way for more informative descriptions and a structured latent space. In the process, we theoretically connect the process of dynamic routing between capsules to the well-known Weiszfeld algorithm, a scheme for solving \emph{iterative re-weighted least squares (IRLS)} problems with provable convergence properties, enabling robust pose estimation between capsule layers. Due to the sparse equivariant quaternion capsules, our architecture allows joint object classification and orientation estimation, which we validate empirically on common benchmark datasets.
3D Point-Capsule Networks
Dec 27, 2018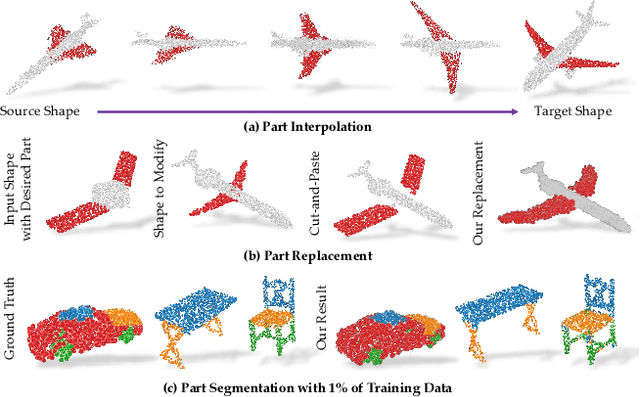
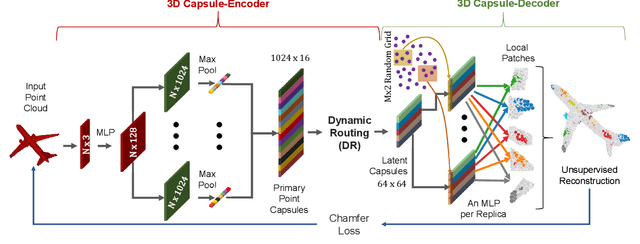

In this paper, we propose 3D point-capsule networks, an auto-encoder designed to process sparse 3D point clouds while preserving spatial arrangements of the input data. 3D capsule networks arise as a direct consequence of our novel unified 3D auto-encoder formulation. Their dynamic routing scheme and the peculiar 2D latent space deployed by our approach bring in improvements for several common point cloud-related tasks, such as object classification, object reconstruction and part segmentation as substantiated by our extensive evaluations. Moreover, it enables new applications such as part interpolation and replacement.
Linearly Supporting Feature Extraction For Automated Estimation Of Stellar Atmospheric Parameters
Apr 10, 2015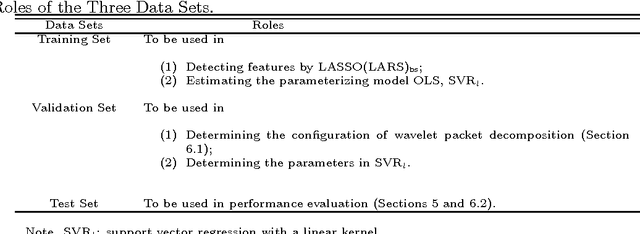
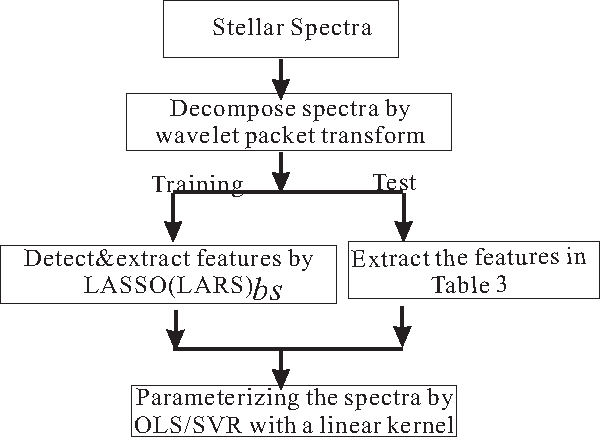
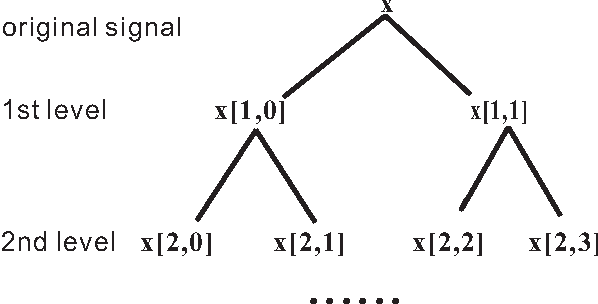
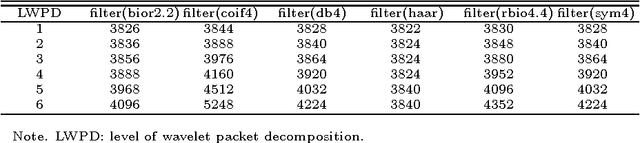
We describe a scheme to extract linearly supporting (LSU) features from stellar spectra to automatically estimate the atmospheric parameters $T_{eff}$, log$~g$, and [Fe/H]. "Linearly supporting" means that the atmospheric parameters can be accurately estimated from the extracted features through a linear model. The successive steps of the process are as follow: first, decompose the spectrum using a wavelet packet (WP) and represent it by the derived decomposition coefficients; second, detect representative spectral features from the decomposition coefficients using the proposed method Least Absolute Shrinkage and Selection Operator (LARS)$_{bs}$; third, estimate the atmospheric parameters $T_{eff}$, log$~g$, and [Fe/H] from the detected features using a linear regression method. One prominent characteristic of this scheme is its ability to evaluate quantitatively the contribution of each detected feature to the atmospheric parameter estimate and also to trace back the physical significance of that feature. This work also shows that the usefulness of a component depends on both wavelength and frequency. The proposed scheme has been evaluated on both real spectra from the Sloan Digital Sky Survey (SDSS)/SEGUE and synthetic spectra calculated from Kurucz's NEWODF models. On real spectra, we extracted 23 features to estimate $T_{eff}$, 62 features for log$~g$, and 68 features for [Fe/H]. Test consistencies between our estimates and those provided by the Spectroscopic Sarameter Pipeline of SDSS show that the mean absolute errors (MAEs) are 0.0062 dex for log$~T_{eff}$ (83 K for $T_{eff}$), 0.2345 dex for log$~g$, and 0.1564 dex for [Fe/H]. For the synthetic spectra, the MAE test accuracies are 0.0022 dex for log$~T_{eff}$ (32 K for $T_{eff}$), 0.0337 dex for log$~g$, and 0.0268 dex for [Fe/H].