 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJPDS-NN: Reinforcement Learning-Based Dynamic Task Allocation for Agricultural Vehicle Routing Optimization
Mar 04, 2025
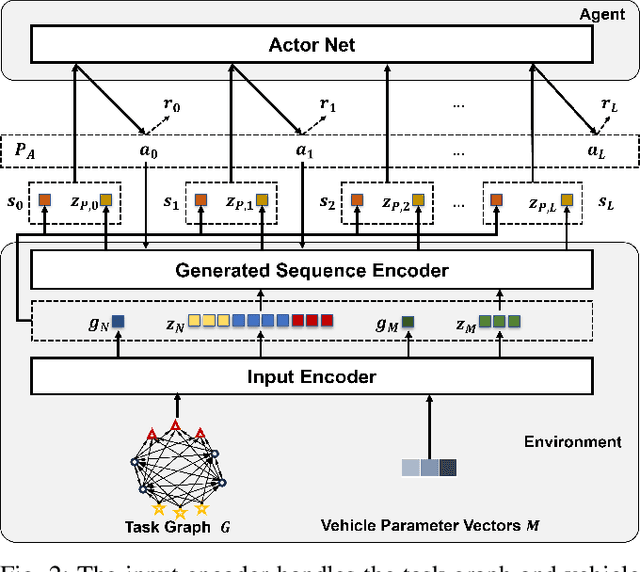


The Entrance Dependent Vehicle Routing Problem (EDVRP) is a variant of the Vehicle Routing Problem (VRP) where the scale of cities influences routing outcomes, necessitating consideration of their entrances. This paper addresses EDVRP in agriculture, focusing on multi-parameter vehicle planning for irregularly shaped fields. To address the limitations of traditional methods, such as heuristic approaches, which often overlook field geometry and entrance constraints, we propose a Joint Probability Distribution Sampling Neural Network (JPDS-NN) to effectively solve the EDVRP. The network uses an encoder-decoder architecture with graph transformers and attention mechanisms to model routing as a Markov Decision Process, and is trained via reinforcement learning for efficient and rapid end-to-end planning. Experimental results indicate that JPDS-NN reduces travel distances by 48.4-65.4%, lowers fuel consumption by 14.0-17.6%, and computes two orders of magnitude faster than baseline methods, while demonstrating 15-25% superior performance in dynamic arrangement scenarios. Ablation studies validate the necessity of cross-attention and pre-training. The framework enables scalable, intelligent routing for large-scale farming under dynamic constraints.
SpaceOctopus: An Octopus-inspired Motion Planning Framework for Multi-arm Space Robot
Mar 13, 2024



Space robots have played a critical role in autonomous maintenance and space junk removal. Multi-arm space robots can efficiently complete the target capture and base reorientation tasks due to their flexibility and the collaborative capabilities between the arms. However, the complex coupling properties arising from both the multiple arms and the free-floating base present challenges to the motion planning problems of multi-arm space robots. We observe that the octopus elegantly achieves similar goals when grabbing prey and escaping from danger. Inspired by the distributed control of octopuses' limbs, we develop a multi-level decentralized motion planning framework to manage the movement of different arms of space robots. This motion planning framework integrates naturally with the multi-agent reinforcement learning (MARL) paradigm. The results indicate that our method outperforms the previous method (centralized training). Leveraging the flexibility of the decentralized framework, we reassemble policies trained for different tasks, enabling the space robot to complete trajectory planning tasks while adjusting the base attitude without further learning. Furthermore, our experiments confirm the superior robustness of our method in the face of external disturbances, changing base masses, and even the failure of one arm.
VL-Grasp: a 6-Dof Interactive Grasp Policy for Language-Oriented Objects in Cluttered Indoor Scenes
Aug 01, 2023Robotic grasping faces new challenges in human-robot-interaction scenarios. We consider the task that the robot grasps a target object designated by human's language directives. The robot not only needs to locate a target based on vision-and-language information, but also needs to predict the reasonable grasp pose candidate at various views and postures. In this work, we propose a novel interactive grasp policy, named Visual-Lingual-Grasp (VL-Grasp), to grasp the target specified by human language. First, we build a new challenging visual grounding dataset to provide functional training data for robotic interactive perception in indoor environments. Second, we propose a 6-Dof interactive grasp policy combined with visual grounding and 6-Dof grasp pose detection to extend the universality of interactive grasping. Third, we design a grasp pose filter module to enhance the performance of the policy. Experiments demonstrate the effectiveness and extendibility of the VL-Grasp in real world. The VL-Grasp achieves a success rate of 72.5\% in different indoor scenes. The code and dataset is available at https://github.com/luyh20/VL-Grasp.
Portrait Interpretation and a Benchmark
Jul 27, 2022We propose a task we name Portrait Interpretation and construct a dataset named Portrait250K for it. Current researches on portraits such as human attribute recognition and person re-identification have achieved many successes, but generally, they: 1) may lack mining the interrelationship between various tasks and the possible benefits it may bring; 2) design deep models specifically for each task, which is inefficient; 3) may be unable to cope with the needs of a unified model and comprehensive perception in actual scenes. In this paper, the proposed portrait interpretation recognizes the perception of humans from a new systematic perspective. We divide the perception of portraits into three aspects, namely Appearance, Posture, and Emotion, and design corresponding sub-tasks for each aspect. Based on the framework of multi-task learning, portrait interpretation requires a comprehensive description of static attributes and dynamic states of portraits. To invigorate research on this new task, we construct a new dataset that contains 250,000 images labeled with identity, gender, age, physique, height, expression, and posture of the whole body and arms. Our dataset is collected from 51 movies, hence covering extensive diversity. Furthermore, we focus on representation learning for portrait interpretation and propose a baseline that reflects our systematic perspective. We also propose an appropriate metric for this task. Our experimental results demonstrate that combining the tasks related to portrait interpretation can yield benefits. Code and dataset will be made public.