 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffordance-Aware Interactive Decision-Making and Execution for Ambiguous Instructions
Feb 05, 2026Enabling robots to explore and act in unfamiliar environments under ambiguous human instructions by interactively identifying task-relevant objects (e.g., identifying cups or beverages for "I'm thirsty") remains challenging for existing vision-language model (VLM)-based methods. This challenge stems from inefficient reasoning and the lack of environmental interaction, which hinder real-time task planning and execution. To address this, We propose Affordance-Aware Interactive Decision-Making and Execution for Ambiguous Instructions (AIDE), a dual-stream framework that integrates interactive exploration with vision-language reasoning, where Multi-Stage Inference (MSI) serves as the decision-making stream and Accelerated Decision-Making (ADM) as the execution stream, enabling zero-shot affordance analysis and interpretation of ambiguous instructions. Extensive experiments in simulation and real-world environments show that AIDE achieves the task planning success rate of over 80\% and more than 95\% accuracy in closed-loop continuous execution at 10 Hz, outperforming existing VLM-based methods in diverse open-world scenarios.
JPDS-NN: Reinforcement Learning-Based Dynamic Task Allocation for Agricultural Vehicle Routing Optimization
Mar 04, 2025
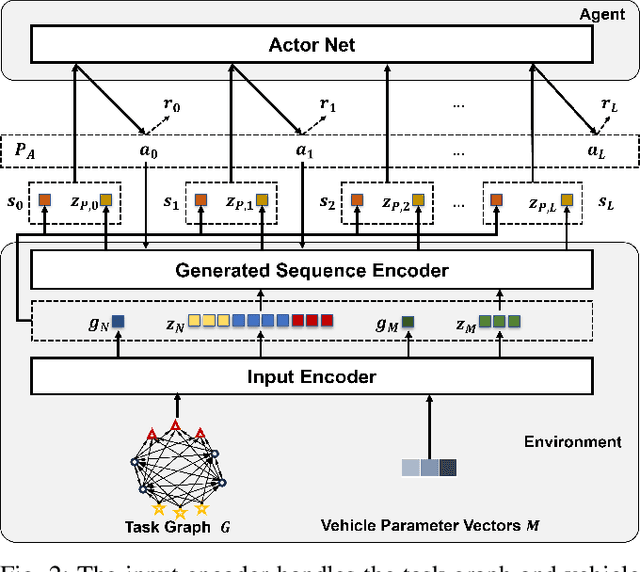


The Entrance Dependent Vehicle Routing Problem (EDVRP) is a variant of the Vehicle Routing Problem (VRP) where the scale of cities influences routing outcomes, necessitating consideration of their entrances. This paper addresses EDVRP in agriculture, focusing on multi-parameter vehicle planning for irregularly shaped fields. To address the limitations of traditional methods, such as heuristic approaches, which often overlook field geometry and entrance constraints, we propose a Joint Probability Distribution Sampling Neural Network (JPDS-NN) to effectively solve the EDVRP. The network uses an encoder-decoder architecture with graph transformers and attention mechanisms to model routing as a Markov Decision Process, and is trained via reinforcement learning for efficient and rapid end-to-end planning. Experimental results indicate that JPDS-NN reduces travel distances by 48.4-65.4%, lowers fuel consumption by 14.0-17.6%, and computes two orders of magnitude faster than baseline methods, while demonstrating 15-25% superior performance in dynamic arrangement scenarios. Ablation studies validate the necessity of cross-attention and pre-training. The framework enables scalable, intelligent routing for large-scale farming under dynamic constraints.
Understand User Opinions of Large Language Models via LLM-Powered In-the-Moment User Experience Interviews
Feb 21, 2025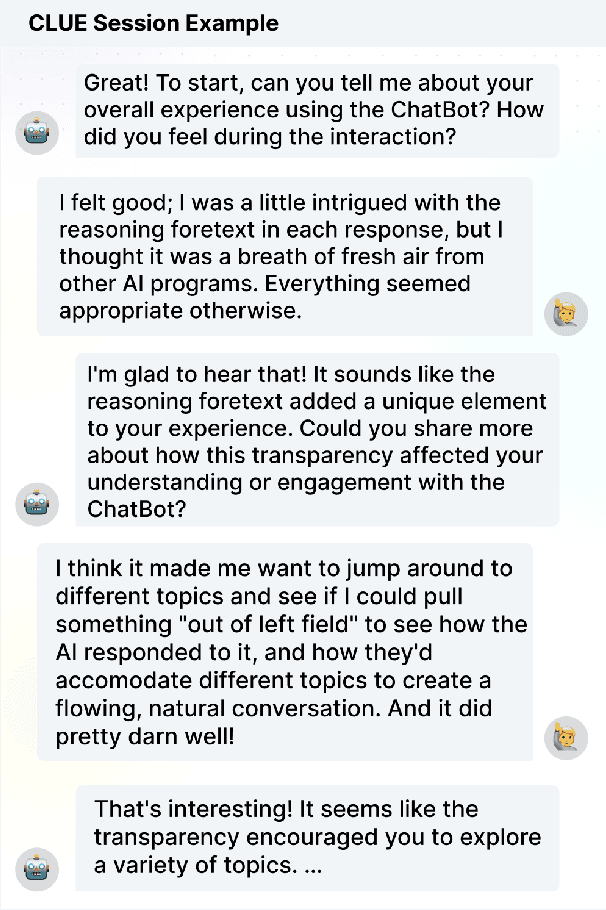
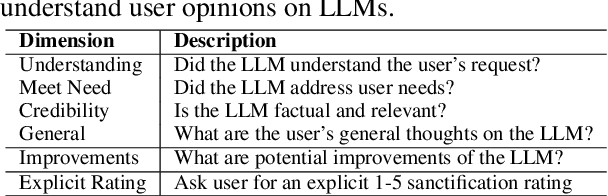
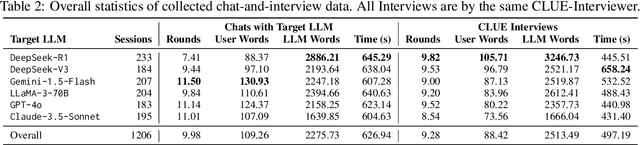
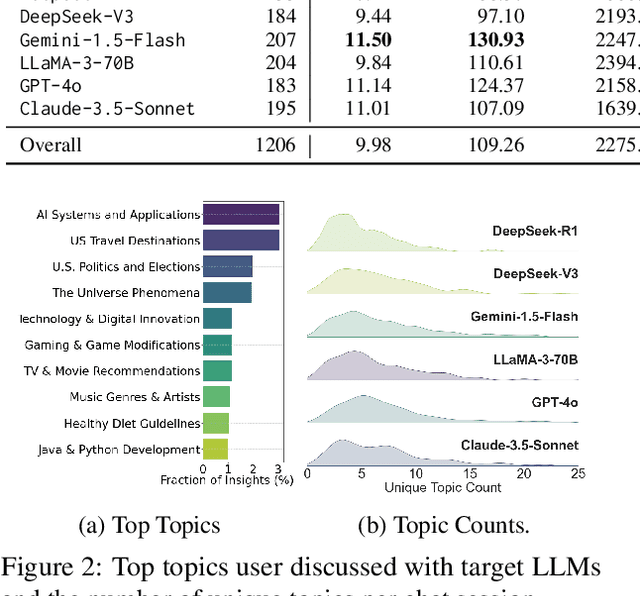
Which large language model (LLM) is better? Every evaluation tells a story, but what do users really think about current LLMs? This paper presents CLUE, an LLM-powered interviewer that conducts in-the-moment user experience interviews, right after users interacted with LLMs, and automatically gathers insights about user opinions from massive interview logs. We conduct a study with thousands of users to understand user opinions on mainstream LLMs, recruiting users to first chat with a target LLM and then interviewed by CLUE. Our experiments demonstrate that CLUE captures interesting user opinions, for example, the bipolar views on the displayed reasoning process of DeepSeek-R1 and demands for information freshness and multi-modality. Our collected chat-and-interview logs will be released.