 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINSPATIO-WORLD: A Real-Time 4D World Simulator via Spatiotemporal Autoregressive Modeling
Apr 08, 2026Building world models with spatial consistency and real-time interactivity remains a fundamental challenge in computer vision. Current video generation paradigms often struggle with a lack of spatial persistence and insufficient visual realism, making it difficult to support seamless navigation in complex environments. To address these challenges, we propose INSPATIO-WORLD, a novel real-time framework capable of recovering and generating high-fidelity, dynamic interactive scenes from a single reference video. At the core of our approach is a Spatiotemporal Autoregressive (STAR) architecture, which enables consistent and controllable scene evolution through two tightly coupled components: Implicit Spatiotemporal Cache aggregates reference and historical observations into a latent world representation, ensuring global consistency during long-horizon navigation; Explicit Spatial Constraint Module enforces geometric structure and translates user interactions into precise and physically plausible camera trajectories. Furthermore, we introduce Joint Distribution Matching Distillation (JDMD). By using real-world data distributions as a regularizing guide, JDMD effectively overcomes the fidelity degradation typically caused by over-reliance on synthetic data. Extensive experiments demonstrate that INSPATIO-WORLD significantly outperforms existing state-of-the-art (SOTA) models in spatial consistency and interaction precision, ranking first among real-time interactive methods on the WorldScore-Dynamic benchmark, and establishing a practical pipeline for navigating 4D environments reconstructed from monocular videos.
InSpatio-WorldFM: An Open-Source Real-Time Generative Frame Model
Mar 12, 2026We present InSpatio-WorldFM, an open-source real-time frame model for spatial intelligence. Unlike video-based world models that rely on sequential frame generation and incur substantial latency due to window-level processing, InSpatio-WorldFM adopts a frame-based paradigm that generates each frame independently, enabling low-latency real-time spatial inference. By enforcing multi-view spatial consistency through explicit 3D anchors and implicit spatial memory, the model preserves global scene geometry while maintaining fine-grained visual details across viewpoint changes. We further introduce a progressive three-stage training pipeline that transforms a pretrained image diffusion model into a controllable frame model and finally into a real-time generator through few-step distillation. Experimental results show that InSpatio-WorldFM achieves strong multi-view consistency while supporting interactive exploration on consumer-grade GPUs, providing an efficient alternative to traditional video-based world models for real-time world simulation.
Non-Markovian Long-Horizon Robot Manipulation via Keyframe Chaining
Mar 02, 2026Existing Vision-Language-Action (VLA) models often struggle to generalize to long-horizon tasks due to their heavy reliance on immediate observations. While recent studies incorporate retrieval mechanisms or extend context windows to handle procedural tasks, they often struggle to capture Non-Markovian dependencies, where optimal actions rely solely on specific past states rather than the current observation. To address this, we introduce Keyframe-Chaining VLA, a framework that extracts and links key historical frames to model long-horizon dependencies. Specifically, we propose an automatic keyframe selector that learns a discriminative embedding space, effectively identifying distinct state transitions. To capture task-critical information, we design a progress-aware query mechanism that dynamically retrieves historical frames based on their temporal relevance to the current execution phase. These selected keyframes are integrated into the VLA as interleaved visual tokens, explicitly grounding the policy in the long-horizon temporal context. Finally, we introduce a suite of four Non-Markovian manipulation tasks built upon the ManiSkill simulator to measure task success rates. Experimental results demonstrate that our method achieves superior performance, effectively tackling robot manipulation tasks characterized by long-horizon temporal dependencies. Code is available at https://github.com/cytoplastm/KC-VLA.
Explore the Ideology of Deep Learning in ENSO Forecasts
Jan 05, 2026The El Ni{~n}o-Southern Oscillation (ENSO) exerts profound influence on global climate variability, yet its prediction remains a grand challenge. Recent advances in deep learning have significantly improved forecasting skill, but the opacity of these models hampers scientific trust and operational deployment. Here, we introduce a mathematically grounded interpretability framework based on bounded variation function. By rescuing the "dead" neurons from the saturation zone of the activation function, we enhance the model's expressive capacity. Our analysis reveals that ENSO predictability emerges dominantly from the tropical Pacific, with contributions from the Indian and Atlantic Oceans, consistent with physical understanding. Controlled experiments affirm the robustness of our method and its alignment with established predictors. Notably, we probe the persistent Spring Predictability Barrier (SPB), finding that despite expanded sensitivity during spring, predictive performance declines-likely due to suboptimal variable selection. These results suggest that incorporating additional ocean-atmosphere variables may help transcend SPB limitations and advance long-range ENSO prediction.
Ming-Omni: A Unified Multimodal Model for Perception and Generation
Jun 11, 2025


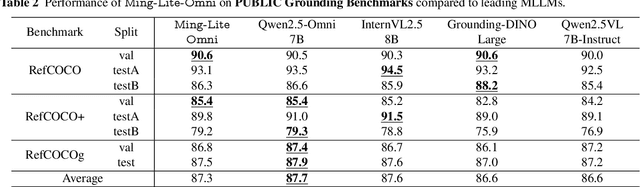
We propose Ming-Omni, a unified multimodal model capable of processing images, text, audio, and video, while demonstrating strong proficiency in both speech and image generation. Ming-Omni employs dedicated encoders to extract tokens from different modalities, which are then processed by Ling, an MoE architecture equipped with newly proposed modality-specific routers. This design enables a single model to efficiently process and fuse multimodal inputs within a unified framework, thereby facilitating diverse tasks without requiring separate models, task-specific fine-tuning, or structural redesign. Importantly, Ming-Omni extends beyond conventional multimodal models by supporting audio and image generation. This is achieved through the integration of an advanced audio decoder for natural-sounding speech and Ming-Lite-Uni for high-quality image generation, which also allow the model to engage in context-aware chatting, perform text-to-speech conversion, and conduct versatile image editing. Our experimental results showcase Ming-Omni offers a powerful solution for unified perception and generation across all modalities. Notably, our proposed Ming-Omni is the first open-source model we are aware of to match GPT-4o in modality support, and we release all code and model weights to encourage further research and development in the community.
RoboBERT: An End-to-end Multimodal Robotic Manipulation Model
Feb 11, 2025Embodied intelligence integrates multiple modalities, enabling agents to understand images, language, and actions simultaneously. However, existing models always depend on additional datasets or extensive pre-training to maximize performance improvements, consuming abundant training time and expensive hardware cost. To tackle this issue, we present RoboBERT, a novel end-to-end robotic manipulation model integrated with a unique training strategy. This model utilizes a CNN-based diffusion policy, enhancing and stabilizing the effectiveness of this model by separating training processes for different modalities. It also underscores the importance of data augmentation, verifying various techniques to significantly boost performance. Unlike models that depend on extra data or large foundation models, RoboBERT achieves a highly competitive success rate while using only language-labeled expert demonstrations and maintaining a relatively smaller model size. Specifically, RoboBERT achieves an average length of 4.52 on the CALVIN benchmark for \(ABCD \rightarrow D\) task, setting a new state-of-the-art (SOTA) record. Furthermore, when tested on a real robot, the model demonstrates superior performance, achieving a higher success rate than other methods trained with the same data. We propose that these concepts and methodologies of RoboBERT demonstrate extensive versatility and compatibility, contributing significantly to the development of lightweight multimodal robotic models. The code can be accessed on https://github.com/PeterWangsicheng/RoboBERT
1-bit Quantized On-chip Hybrid Diffraction Neural Network Enabled by Authentic All-optical Fully-connected Architecture
Apr 11, 2024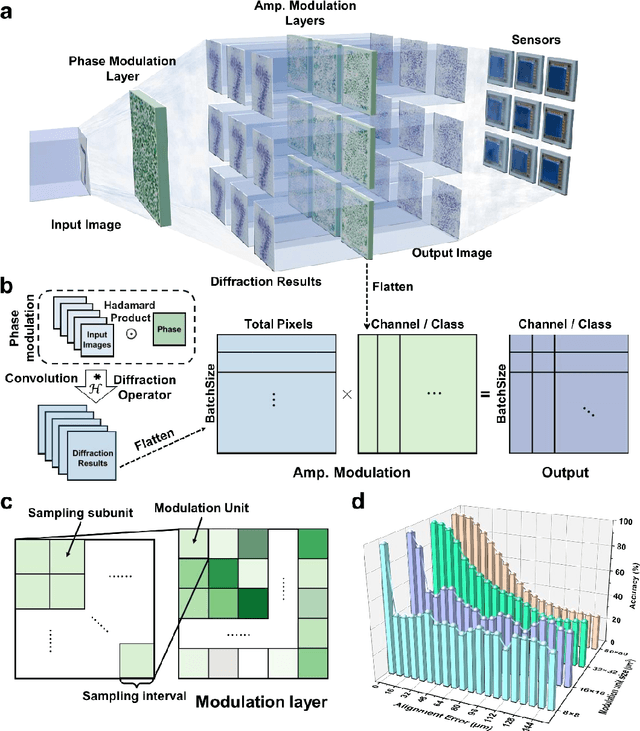
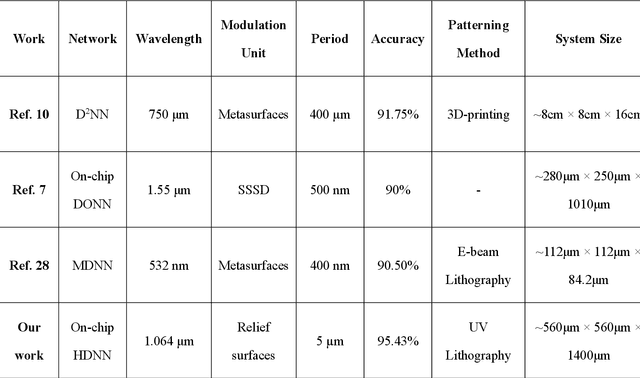

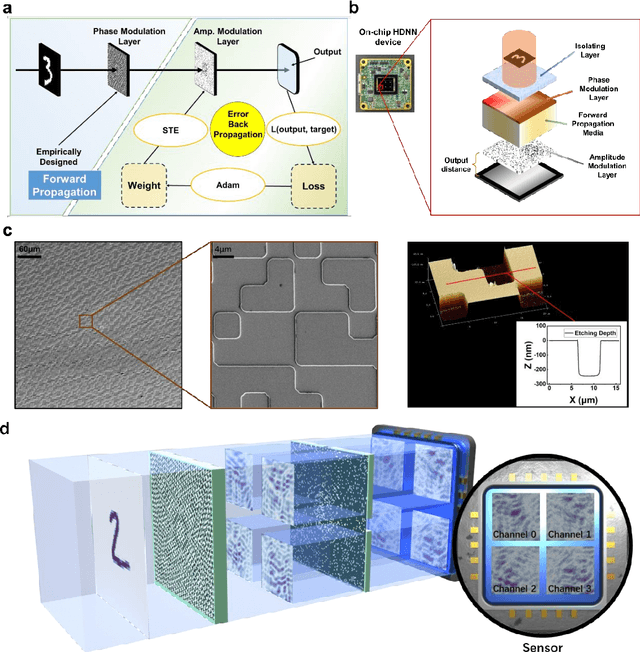
Optical Diffraction Neural Networks (DNNs), a subset of Optical Neural Networks (ONNs), show promise in mirroring the prowess of electronic networks. This study introduces the Hybrid Diffraction Neural Network (HDNN), a novel architecture that incorporates matrix multiplication into DNNs, synergizing the benefits of conventional ONNs with those of DNNs to surmount the modulation limitations inherent in optical diffraction neural networks. Utilizing a singular phase modulation layer and an amplitude modulation layer, the trained neural network demonstrated remarkable accuracies of 96.39% and 89% in digit recognition tasks in simulation and experiment, respectively. Additionally, we develop the Binning Design (BD) method, which effectively mitigates the constraints imposed by sampling intervals on diffraction units, substantially streamlining experimental procedures. Furthermore, we propose an on-chip HDNN that not only employs a beam-splitting phase modulation layer for enhanced integration level but also significantly relaxes device fabrication requirements, replacing metasurfaces with relief surfaces designed by 1-bit quantization. Besides, we conceptualized an all-optical HDNN-assisted lesion detection network, achieving detection outcomes that were 100% aligned with simulation predictions. This work not only advances the performance of DNNs but also streamlines the path towards industrial optical neural network production.