 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Model-Driven Cooperative Operator Ensemble Evolution for Permutation Flow Shop Scheduling
Jun 16, 2026The permutation flow shop scheduling problem (PFSP) is a classical NP-hard combinatorial optimization problem in intelligent manufacturing. In practice, PFSP is commonly addressed using metaheuristic algorithms, among which the iterated greedy (IG) algorithm is widely adopted due to its simplicity and strong empirical performance. However, classical IG relies on a single fixed destruction operator, which often limits exploration and leads to search stagnation on large and complex problem instances. To address this issue, this work proposes a multi-operator IG algorithm, termed IG-DOE, which enhances exploration by switching among heterogeneous destruction operators along a single search trajectory. The core mechanism, called stagnation-triggered sequential switching, activates the next destruction operator in an ordered destruction operator ensemble (DOE) when stagnation is detected, thereby enriching the perturbation behavior of classical IG. Moreover, to reduce reliance on expert-crafted operators, a large language model (LLM)-assisted framework, termed SCOE, is introduced to automatically construct a high-quality DOE through stagewise evolution, state-awareness, and cooperative evaluation. Experiments on the challenging VRF-hard-large benchmark show that the DOE evolved from smaller problem instances generalizes well to larger unseen instances. Under the same CPU-time limit, IG-DOE obtained much better average performance than QIG, a state-of-the-art IG algorithm. Additional experiments on real-world industrial-data-derived instances further show that the evolved DOE can generalize effectively to different data distributions without additional adaptation.
AutoSG: LLM-Driven Solver Generation Solely from Task Prompts for Expensive Optimization
May 25, 2026Expensive optimization tasks are ubiquitous in real-world applications, demanding highly specialized solvers. While LLM-driven automated solver generation shows promise, current paradigms face three critical issues when tackling expensive optimization: factual hallucinations due to deficient domain knowledge, the frequent dismantling of previously established locally optimal structures during refinement, and the prohibitive evaluation costs alongside restricted generalization caused by executing on training instances. To address these issues, we introduce AutoSG, a fully automated workflow directly translating natural language prompts into executable customized solvers. AutoSG features three core innovations: a retrieval-augmented solver generation module strictly grounding code in verified literature; a one-step self-refinement operator introducing task-specific improvements while preserving critical structural components; and an instance-free Elo-based LLM-as-a-Judge evaluation mechanism rapidly establishing global rankings. Extensive evaluations across diverse expensive optimization tasks confirm AutoSG significantly outperforms human-designed state-of-the-art frameworks and existing LLM-generated solvers.
Machine Learning for Two-Stage Graph Sparsification for the Travelling Salesman Problem
Apr 22, 2026High-performance TSP solvers like LKH search within a sparsified candidate graph rather than over all possible edges. Graph sparsification is non-trivial: keep too many edges and the solver wastes time; cut too many and it loses edges that belong to the optimal tour. The two leading heuristic methods, $α$-Nearest and POPMUSIC, produce high-quality candidate graphs, but no single heuristic is both sparse and reliable across all instance sizes and distributions. Machine learning methods can potentially learn better sparsification models. However, existing approaches operate on the complete graph, which is expensive and mostly restricted to Euclidean distances. To address this issue, we propose a two-stage graph sparsification approach: Stage~1 takes the union of $α$-Nearest and POPMUSIC to maximise recall; Stage~2 trains a single model to reduce density. We conducted experiments across four TSPLIB distance types, five spatial distributions, and problem sizes from 50 to 500. The two-stage approach substantially reduces candidate-graph density while retaining high coverage, generalises across distance types and distributions, outperforms recent neural sparsification methods that are restricted to Euclidean distances, and becomes increasingly valuable at larger scales where single-stage heuristics degrade.
Surrogate-Assisted Genetic Programming with Rank-Based Phenotypic Characterisation for Dynamic Multi-Mode Project Scheduling
Mar 17, 2026The dynamic multi-mode resource-constrained project scheduling problem (DMRCPSP) is of practical importance, as it requires making real-time decisions under changing project states and resource availability. Genetic Programming (GP) has been shown to effectively evolve heuristic rules for such decision-making tasks; however, the evolutionary process typically relies on a large number of simulation-based fitness evaluations, resulting in high computational cost. Surrogate models offer a promising solution to reduce evaluation cost, but their application to GP requires problem-specific phenotypic characterisation (PC) schemes of heuristic rules. There is currently a lack of suitable PC schemes for GP applied to DMRCPSP. This paper proposes a rank-based PC scheme derived from heuristic-driven ordering of eligible activity-mode pairs and activity groups in decision situations. The resulting PC vectors enable a surrogate model to estimate the fitness of unevaluated GP individuals. Based on this scheme, a surrogate-assisted GP algorithm is developed. Experimental results demonstrate that the proposed surrogate-assisted GP can identify high-quality heuristic rules consistently earlier than the state-of-the-art GP approach for DMRCPSP, while introducing only marginal computational overhead. Further analyses demonstrate that the surrogate model provides useful guidance for offspring selection, leading to improved evolutionary efficiency.
Keep Rehearsing and Refining: Lifelong Learning Vehicle Routing under Continually Drifting Tasks
Jan 30, 2026Existing neural solvers for vehicle routing problems (VRPs) are typically trained either in a one-off manner on a fixed set of pre-defined tasks or in a lifelong manner on several tasks arriving sequentially, assuming sufficient training on each task. Both settings overlook a common real-world property: problem patterns may drift continually over time, yielding massive tasks sequentially arising while offering only limited training resources per task. In this paper, we study a novel lifelong learning paradigm for neural VRP solvers under continually drifting tasks over learning time steps, where sufficient training for any given task at any time is not available. We propose Dual Replay with Experience Enhancement (DREE), a general framework to improve learning efficiency and mitigate catastrophic forgetting under such drift. Extensive experiments show that, under such continual drift, DREE effectively learns new tasks, preserves prior knowledge, improves generalization to unseen tasks, and can be applied to diverse existing neural solvers.
HEATACO: Heatmap-Guided Ant Colony Decoding for Large-Scale Travelling Salesman Problems
Jan 26, 2026Heatmap-based non-autoregressive solvers for large-scale Travelling Salesman Problems output dense edge-probability scores, yet final performance largely hinges on the decoder that must satisfy degree-2 constraints and form a single Hamiltonian tour. Greedy commitment can cascade into irreparable mistakes at large $N$, whereas MCTS-guided local search is accurate but compute-heavy and highly engineered. We instead treat the heatmap as a soft edge prior and cast decoding as probabilistic tour construction under feasibility constraints, where the key is to correct local mis-rankings via inexpensive global coordination. Based on this view, we introduce HeatACO, a plug-and-play Max-Min Ant System decoder whose transition policy is softly biased by the heatmap while pheromone updates provide lightweight, instance-specific feedback to resolve global conflicts; optional 2-opt/3-opt post-processing further improves tour quality. On TSP500/1K/10K, using heatmaps produced by four pretrained predictors, HeatACO+2opt achieves gaps down to 0.11%/0.23%/1.15% with seconds-to-minutes CPU decoding for fixed heatmaps, offering a better quality--time trade-off than greedy decoding and published MCTS-based decoders. Finally, we find the gains track heatmap reliability: under distribution shift, miscalibration and confidence collapse bound decoding improvements, suggesting heatmap generalisation is a primary lever for further progress.
Investigation of the Generalisation Ability of Genetic Programming-evolved Scheduling Rules in Dynamic Flexible Job Shop Scheduling
Jan 22, 2026Dynamic Flexible Job Shop Scheduling (DFJSS) is a complex combinatorial optimisation problem that requires simultaneous machine assignment and operation sequencing decisions in dynamic production environments. Genetic Programming (GP) has been widely applied to automatically evolve scheduling rules for DFJSS. However, existing studies typically train and test GP-evolved rules on DFJSS instances of the same type, which differ only by random seeds rather than by structural characteristics, leaving their cross-type generalisation ability largely unexplored. To address this gap, this paper systematically investigates the generalisation ability of GP-evolved scheduling rules under diverse DFJSS conditions. A series of experiments are conducted across multiple dimensions, including problem scale (i.e., the number of machines and jobs), key job shop parameters (e.g., utilisation level), and data distributions, to analyse how these factors influence GP performance on unseen instance types. The results show that good generalisation occurs when the training instances contain more jobs than the test instances while keeping the number of machines fixed, and when both training and test instances have similar scales or job shop parameters. Further analysis reveals that the number and distribution of decision points in DFJSS instances play a crucial role in explaining these performance differences. Similar decision point distributions lead to better generalisation, whereas significant discrepancies result in a marked degradation of performance. Overall, this study provides new insights into the generalisation ability of GP in DFJSS and highlights the necessity of evolving more generalisable GP rules capable of handling heterogeneous DFJSS instances effectively.
Scalable Knee-Point Guided Activity Group Selection in Multi-Tree Genetic Programming for Dynamic Multi-Mode Project Scheduling
Jan 20, 2026The dynamic multi-mode resource-constrained project scheduling problem is a challenging scheduling problem that requires making decisions on both the execution order of activities and their corresponding execution modes. Genetic programming has been widely applied as a hyper-heuristic to evolve priority rules that guide the selection of activity-mode pairs from the current eligible set. Recently, an activity group selection strategy has been proposed to select a subset of activities rather than a single activity at each decision point, allowing for more effective scheduling by considering the interdependence between activities. Although effective in small-scale instances, this strategy suffers from scalability issues when applied to larger problems. In this work, we enhance the scalability of the group selection strategy by introducing a knee-point-based selection mechanism to identify a promising subset of activities before evaluating their combinations. An activity ordering rule is first used to rank all eligible activity-mode pairs, followed by a knee point selection to find the promising pairs. Then, a group selection rule selects the best activity combination. We develop a multi-tree GP framework to evolve both types of rules simultaneously. Experimental results demonstrate that our approach scales well to large instances and outperforms GP with sequential decision-making in most scenarios.
Overlooked Safety Vulnerability in LLMs: Malicious Intelligent Optimization Algorithm Request and its Jailbreak
Jan 01, 2026The widespread deployment of large language models (LLMs) has raised growing concerns about their misuse risks and associated safety issues. While prior studies have examined the safety of LLMs in general usage, code generation, and agent-based applications, their vulnerabilities in automated algorithm design remain underexplored. To fill this gap, this study investigates this overlooked safety vulnerability, with a particular focus on intelligent optimization algorithm design, given its prevalent use in complex decision-making scenarios. We introduce MalOptBench, a benchmark consisting of 60 malicious optimization algorithm requests, and propose MOBjailbreak, a jailbreak method tailored for this scenario. Through extensive evaluation of 13 mainstream LLMs including the latest GPT-5 and DeepSeek-V3.1, we reveal that most models remain highly susceptible to such attacks, with an average attack success rate of 83.59% and an average harmfulness score of 4.28 out of 5 on original harmful prompts, and near-complete failure under MOBjailbreak. Furthermore, we assess state-of-the-art plug-and-play defenses that can be applied to closed-source models, and find that they are only marginally effective against MOBjailbreak and prone to exaggerated safety behaviors. These findings highlight the urgent need for stronger alignment techniques to safeguard LLMs against misuse in algorithm design.
GAMA: A Neural Neighborhood Search Method with Graph-aware Multi-modal Attention for Vehicle Routing Problem
Nov 11, 2025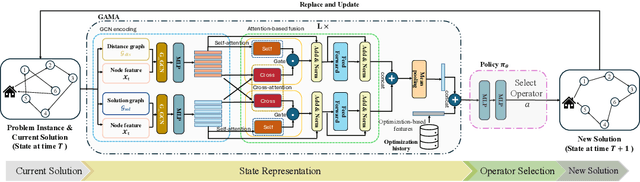
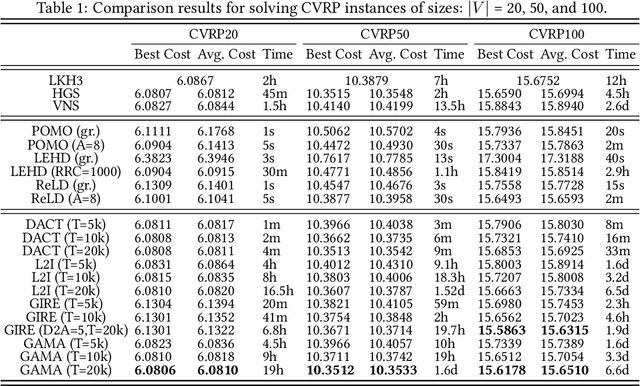
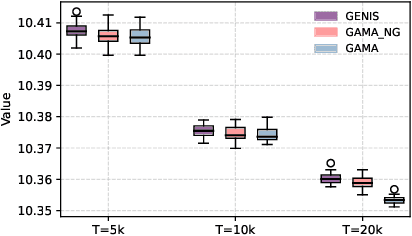
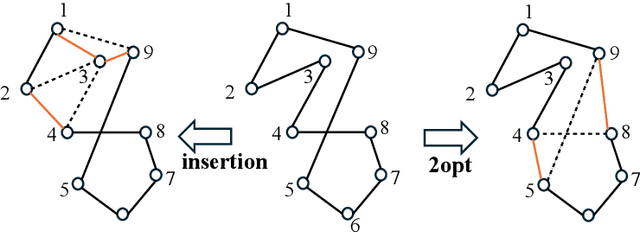
Recent advances in neural neighborhood search methods have shown potential in tackling Vehicle Routing Problems (VRPs). However, most existing approaches rely on simplistic state representations and fuse heterogeneous information via naive concatenation, limiting their ability to capture rich structural and semantic context. To address these limitations, we propose GAMA, a neural neighborhood search method with Graph-aware Multi-modal Attention model in VRP. GAMA encodes the problem instance and its evolving solution as distinct modalities using graph neural networks, and models their intra- and inter-modal interactions through stacked self- and cross-attention layers. A gated fusion mechanism further integrates the multi-modal representations into a structured state, enabling the policy to make informed and generalizable operator selection decisions. Extensive experiments conducted across various synthetic and benchmark instances demonstrate that the proposed algorithm GAMA significantly outperforms the recent neural baselines. Further ablation studies confirm that both the multi-modal attention mechanism and the gated fusion design play a key role in achieving the observed performance gains.