 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Traffic Signal Control via Genetic Programming
Paper and Code
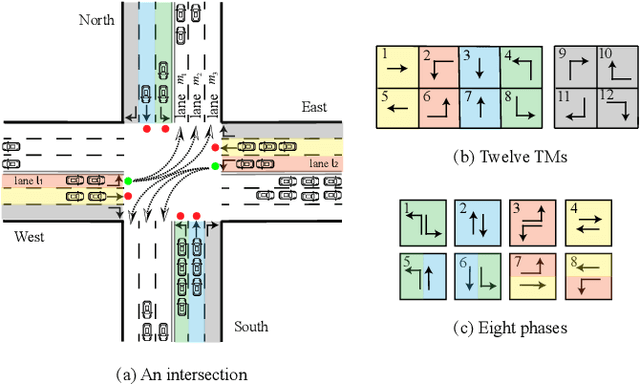
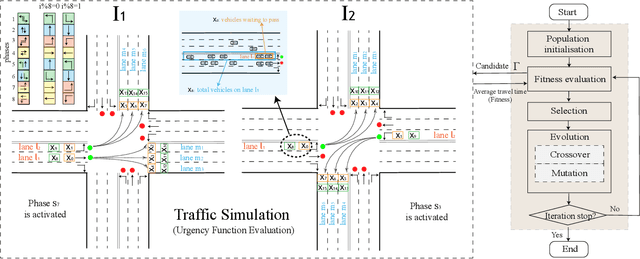
The control of traffic signals is crucial for improving transportation efficiency. Recently, learning-based methods, especially Deep Reinforcement Learning (DRL), garnered substantial success in the quest for more efficient traffic signal control strategies. However, the design of rewards in DRL highly demands domain knowledge to converge to an effective policy, and the final policy also presents difficulties in terms of explainability. In this work, a new learning-based method for signal control in complex intersections is proposed. In our approach, we design a concept of phase urgency for each signal phase. During signal transitions, the traffic light control strategy selects the next phase to be activated based on the phase urgency. We then proposed to represent the urgency function as an explainable tree structure. The urgency function can calculate the phase urgency for a specific phase based on the current road conditions. Genetic programming is adopted to perform gradient-free optimization of the urgency function. We test our algorithm on multiple public traffic signal control datasets. The experimental results indicate that the tree-shaped urgency function evolved by genetic programming outperforms the baselines, including a state-of-the-art method in the transportation field and a well-known DRL-based method.