 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymLight: Exploring Interpretable and Deployable Symbolic Policies for Traffic Signal Control
Nov 08, 2025Deep Reinforcement Learning have achieved significant success in automatically devising effective traffic signal control (TSC) policies. Neural policies, however, tend to be over-parameterized and non-transparent, hindering their interpretability and deployability on resource-limited edge devices. This work presents SymLight, a priority function search framework based on Monte Carlo Tree Search (MCTS) for discovering inherently interpretable and deployable symbolic priority functions to serve as the TSC policies. The priority function, in particular, accepts traffic features as input and then outputs a priority for each traffic signal phase, which subsequently directs the phase transition. For effective search, we propose a concise yet expressive priority function representation. This helps mitigate the combinatorial explosion of the action space in MCTS. Additionally, a probabilistic structural rollout strategy is introduced to leverage structural patterns from previously discovered high-quality priority functions, guiding the rollout process. Our experiments on real-world datasets demonstrate SymLight's superior performance across a range of baselines. A key advantage is SymLight's ability to produce interpretable and deployable TSC policies while maintaining excellent performance.
Generalized Phase Pressure Control Enhanced Reinforcement Learning for Traffic Signal Control
Mar 26, 2025Appropriate traffic state representation is crucial for learning traffic signal control policies. However, most of the current traffic state representations are heuristically designed, with insufficient theoretical support. In this paper, we (1) develop a flexible, efficient, and theoretically grounded method, namely generalized phase pressure (G2P) control, which takes only simple lane features into consideration to decide which phase to be actuated; 2) extend the pressure control theory to a general form for multi-homogeneous-lane road networks based on queueing theory; (3) design a new traffic state representation based on the generalized phase state features from G2P control; and 4) develop a reinforcement learning (RL)-based algorithm template named G2P-XLight, and two RL algorithms, G2P-MPLight and G2P-CoLight, by combining the generalized phase state representation with MPLight and CoLight, two well-performed RL methods for learning traffic signal control policies. Extensive experiments conducted on multiple real-world datasets demonstrate that G2P control outperforms the state-of-the-art (SOTA) heuristic method in the transportation field and other recent human-designed heuristic methods; and that the newly proposed G2P-XLight significantly outperforms SOTA learning-based approaches. Our code is available online.
Emergent Crowd Grouping via Heuristic Self-Organization
Jun 30, 2024Modeling crowds has many important applications in games and computer animation. Inspired by the emergent following effect in real-life crowd scenarios, in this work, we develop a method for implicitly grouping moving agents. We achieve this by analyzing local information around each agent and rotating its preferred velocity accordingly. Each agent could automatically form an implicit group with its neighboring agents that have similar directions. In contrast to an explicit group, there are no strict boundaries for an implicit group. If an agent's direction deviates from its group as a result of positional changes, it will autonomously exit the group or join another implicitly formed neighboring group. This implicit grouping is autonomously emergent among agents rather than deliberately controlled by the algorithm. The proposed method is compared with many crowd simulation models, and the experimental results indicate that our approach achieves the lowest congestion levels in some classic scenarios. In addition, we demonstrate that adjusting the preferred velocity of agents can actually reduce the dissimilarity between their actual velocity and the original preferred velocity. Our work is available online.
Learning Traffic Signal Control via Genetic Programming
Mar 26, 2024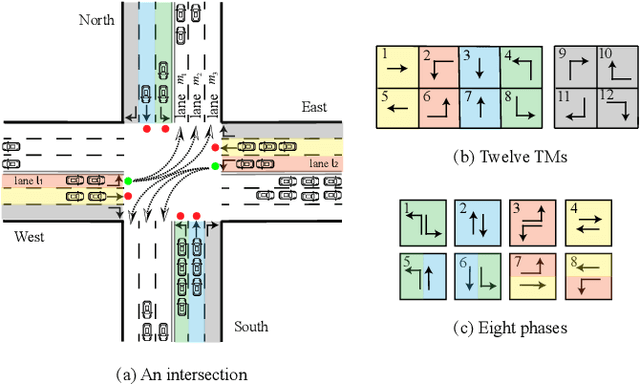
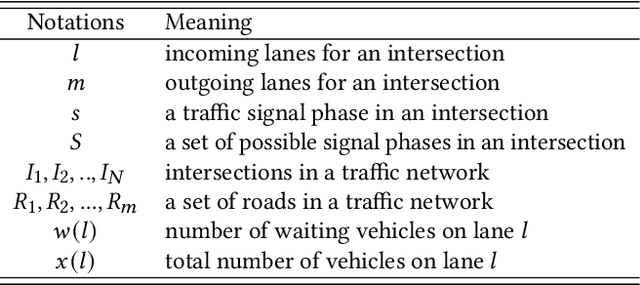
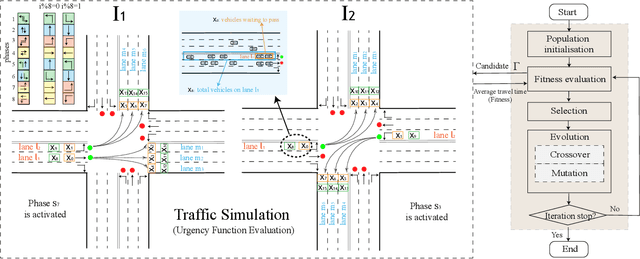
The control of traffic signals is crucial for improving transportation efficiency. Recently, learning-based methods, especially Deep Reinforcement Learning (DRL), garnered substantial success in the quest for more efficient traffic signal control strategies. However, the design of rewards in DRL highly demands domain knowledge to converge to an effective policy, and the final policy also presents difficulties in terms of explainability. In this work, a new learning-based method for signal control in complex intersections is proposed. In our approach, we design a concept of phase urgency for each signal phase. During signal transitions, the traffic light control strategy selects the next phase to be activated based on the phase urgency. We then proposed to represent the urgency function as an explainable tree structure. The urgency function can calculate the phase urgency for a specific phase based on the current road conditions. Genetic programming is adopted to perform gradient-free optimization of the urgency function. We test our algorithm on multiple public traffic signal control datasets. The experimental results indicate that the tree-shaped urgency function evolved by genetic programming outperforms the baselines, including a state-of-the-art method in the transportation field and a well-known DRL-based method.