 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroMorse: A Temporally Structured Dataset For Neuromorphic Computing
Feb 28, 2025Neuromorphic engineering aims to advance computing by mimicking the brain's efficient processing, where data is encoded as asynchronous temporal events. This eliminates the need for a synchronisation clock and minimises power consumption when no data is present. However, many benchmarks for neuromorphic algorithms primarily focus on spatial features, neglecting the temporal dynamics that are inherent to most sequence-based tasks. This gap may lead to evaluations that fail to fully capture the unique strengths and characteristics of neuromorphic systems. In this paper, we present NeuroMorse, a temporally structured dataset designed for benchmarking neuromorphic learning systems. NeuroMorse converts the top 50 words in the English language into temporal Morse code spike sequences. Despite using only two input spike channels for Morse dots and dashes, complex information is encoded through temporal patterns in the data. The proposed benchmark contains feature hierarchy at multiple temporal scales that test the capacity of neuromorphic algorithms to decompose input patterns into spatial and temporal hierarchies. We demonstrate that our training set is challenging to categorise using a linear classifier and that identifying keywords in the test set is difficult using conventional methods. The NeuroMorse dataset is available at Zenodo, with our accompanying code on GitHub at https://github.com/Ben-E-Walters/NeuroMorse.
A Neuromorphic Architecture for Reinforcement Learning from Real-Valued Observations
Jul 06, 2023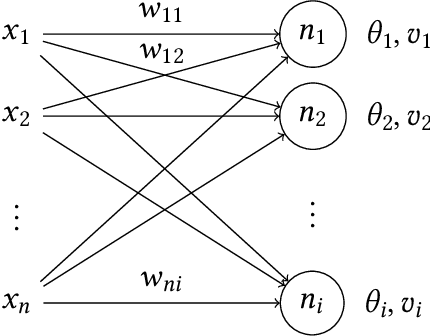
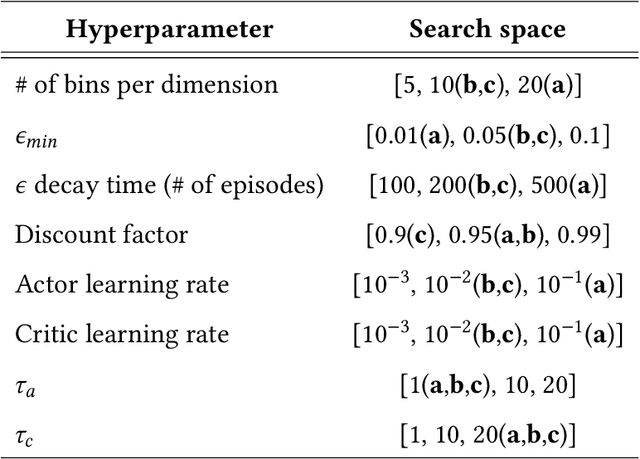
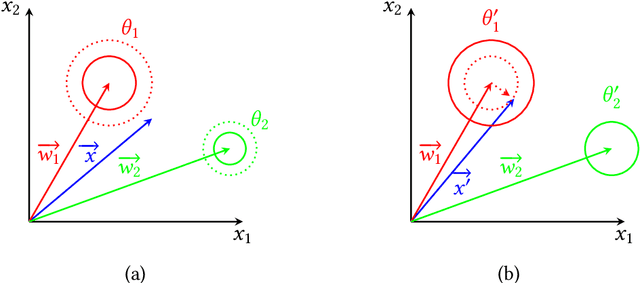
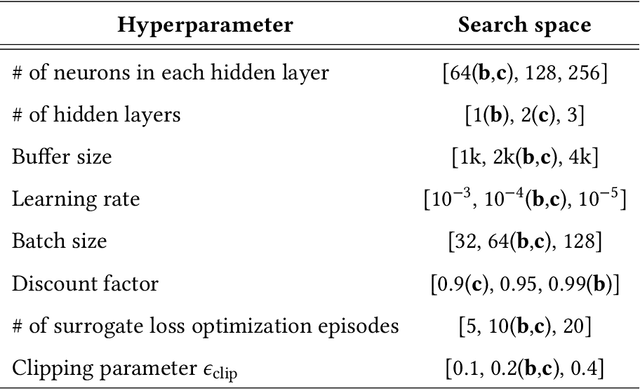
Reinforcement Learning (RL) provides a powerful framework for decision-making in complex environments. However, implementing RL in hardware-efficient and bio-inspired ways remains a challenge. This paper presents a novel Spiking Neural Network (SNN) architecture for solving RL problems with real-valued observations. The proposed model incorporates multi-layered event-based clustering, with the addition of Temporal Difference (TD)-error modulation and eligibility traces, building upon prior work. An ablation study confirms the significant impact of these components on the proposed model's performance. A tabular actor-critic algorithm with eligibility traces and a state-of-the-art Proximal Policy Optimization (PPO) algorithm are used as benchmarks. Our network consistently outperforms the tabular approach and successfully discovers stable control policies on classic RL environments: mountain car, cart-pole, and acrobot. The proposed model offers an appealing trade-off in terms of computational and hardware implementation requirements. The model does not require an external memory buffer nor a global error gradient computation, and synaptic updates occur online, driven by local learning rules and a broadcasted TD-error signal. Thus, this work contributes to the development of more hardware-efficient RL solutions.
Efficient Implementation of a Multi-Layer Gradient-Free Online-Trainable Spiking Neural Network on FPGA
May 31, 2023This paper presents an efficient hardware implementation of the recently proposed Optimized Deep Event-driven Spiking Neural Network Architecture (ODESA). ODESA is the first network to have end-to-end multi-layer online local supervised training without using gradients and has the combined adaptation of weights and thresholds in an efficient hierarchical structure. This research shows that the network architecture and the online training of weights and thresholds can be implemented efficiently on a large scale in hardware. The implementation consists of a multi-layer Spiking Neural Network (SNN) and individual training modules for each layer that enable online self-learning without using back-propagation. By using simple local adaptive selection thresholds, a Winner-Takes-All (WTA) constraint on each layer, and a modified weight update rule that is more amenable to hardware, the trainer module allocates neuronal resources optimally at each layer without having to pass high-precision error measurements across layers. All elements in the system, including the training module, interact using event-based binary spikes. The hardware-optimized implementation is shown to preserve the performance of the original algorithm across multiple spatial-temporal classification problems with significantly reduced hardware requirements.
Event-driven Spectrotemporal Feature Extraction and Classification using a Silicon Cochlea Model
Dec 14, 2022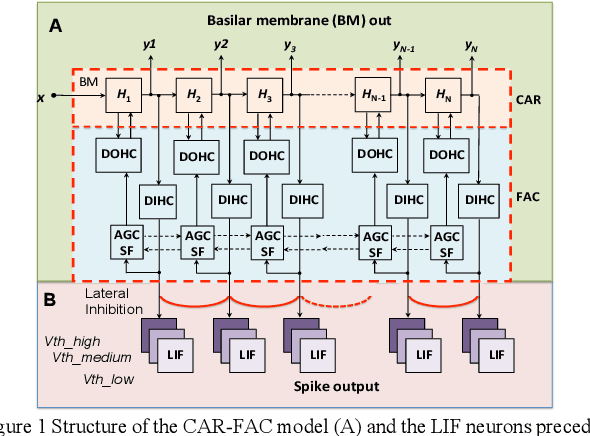
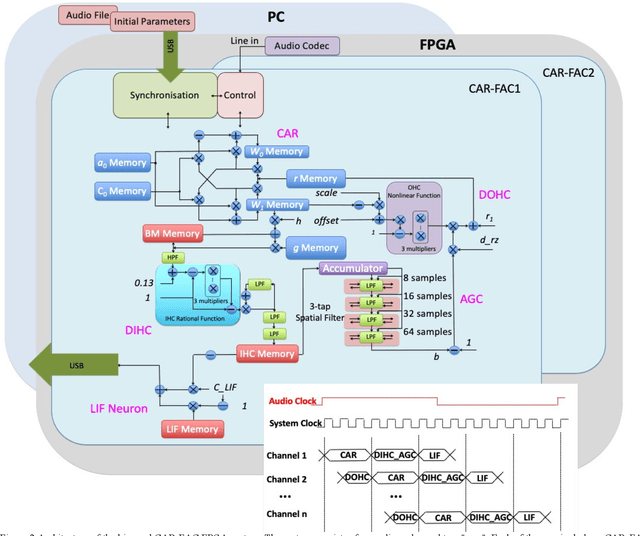
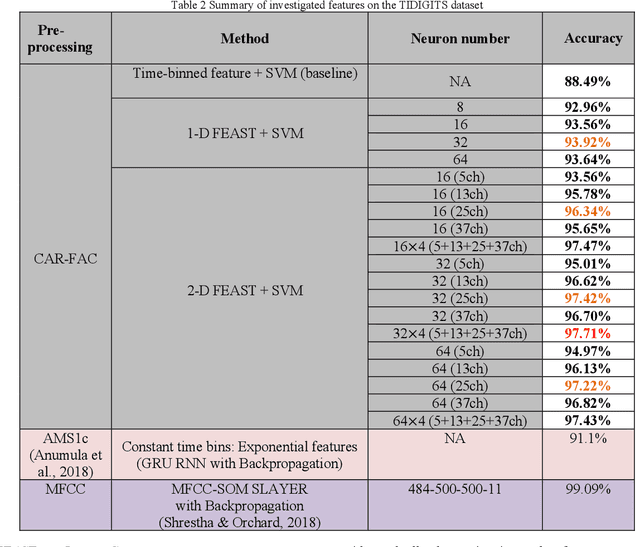
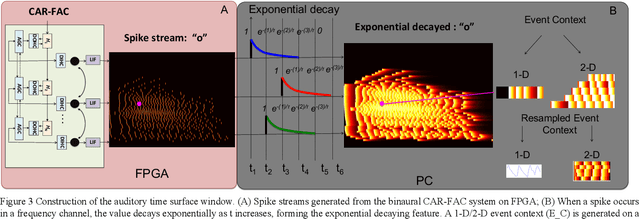
This paper presents a reconfigurable digital implementation of an event-based binaural cochlear system on a Field Programmable Gate Array (FPGA). It consists of a pair of the Cascade of Asymmetric Resonators with Fast Acting Compression (CAR FAC) cochlea models and leaky integrate and fire (LIF) neurons. Additionally, we propose an event-driven SpectroTemporal Receptive Field (STRF) Feature Extraction using Adaptive Selection Thresholds (FEAST). It is tested on the TIDIGTIS benchmark and compared with current event-based auditory signal processing approaches and neural networks.
An optimised deep spiking neural network architecture without gradients
Oct 12, 2021
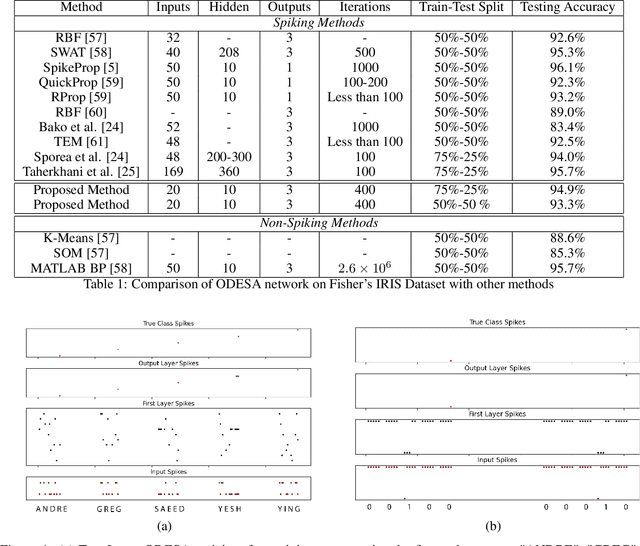
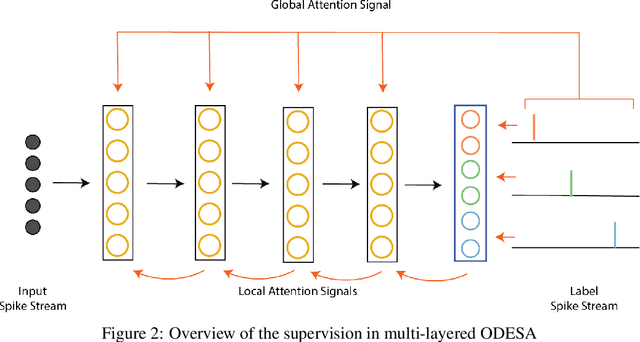

We present an end-to-end trainable modular event-driven neural architecture that uses local synaptic and threshold adaptation rules to perform transformations between arbitrary spatio-temporal spike patterns. The architecture represents a highly abstracted model of existing Spiking Neural Network (SNN) architectures. The proposed Optimized Deep Event-driven Spiking neural network Architecture (ODESA) can simultaneously learn hierarchical spatio-temporal features at multiple arbitrary time scales. ODESA performs online learning without the use of error back-propagation or the calculation of gradients. Through the use of simple local adaptive selection thresholds at each node, the network rapidly learns to appropriately allocate its neuronal resources at each layer for any given problem without using a real-valued error measure. These adaptive selection thresholds are the central feature of ODESA, ensuring network stability and remarkable robustness to noise as well as to the selection of initial system parameters. Network activations are inherently sparse due to a hard Winner-Take-All (WTA) constraint at each layer. We evaluate the architecture on existing spatio-temporal datasets, including the spike-encoded IRIS and TIDIGITS datasets, as well as a novel set of tasks based on International Morse Code that we created. These tests demonstrate the hierarchical spatio-temporal learning capabilities of ODESA. Through these tests, we demonstrate ODESA can optimally solve practical and highly challenging hierarchical spatio-temporal learning tasks with the minimum possible number of computing nodes.