 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeed Detection in Challenging Field Conditions: A Semi-Supervised Framework for Overcoming Shadow Bias and Data Scarcity
Aug 27, 2025The automated management of invasive weeds is critical for sustainable agriculture, yet the performance of deep learning models in real-world fields is often compromised by two factors: challenging environmental conditions and the high cost of data annotation. This study tackles both issues through a diagnostic-driven, semi-supervised framework. Using a unique dataset of approximately 975 labeled and 10,000 unlabeled images of Guinea Grass in sugarcane, we first establish strong supervised baselines for classification (ResNet) and detection (YOLO, RF-DETR), achieving F1 scores up to 0.90 and mAP50 scores exceeding 0.82. Crucially, this foundational analysis, aided by interpretability tools, uncovered a pervasive "shadow bias," where models learned to misidentify shadows as vegetation. This diagnostic insight motivated our primary contribution: a semi-supervised pipeline that leverages unlabeled data to enhance model robustness. By training models on a more diverse set of visual information through pseudo-labeling, this framework not only helps mitigate the shadow bias but also provides a tangible boost in recall, a critical metric for minimizing weed escapes in automated spraying systems. To validate our methodology, we demonstrate its effectiveness in a low-data regime on a public crop-weed benchmark. Our work provides a clear and field-tested framework for developing, diagnosing, and improving robust computer vision systems for the complex realities of precision agriculture.
Advancements in Weed Mapping: A Systematic Review
Jul 02, 2025Weed mapping plays a critical role in precision management by providing accurate and timely data on weed distribution, enabling targeted control and reduced herbicide use. This minimizes environmental impacts, supports sustainable land management, and improves outcomes across agricultural and natural environments. Recent advances in weed mapping leverage ground-vehicle Red Green Blue (RGB) cameras, satellite and drone-based remote sensing combined with sensors such as spectral, Near Infra-Red (NIR), and thermal cameras. The resulting data are processed using advanced techniques including big data analytics and machine learning, significantly improving the spatial and temporal resolution of weed maps and enabling site-specific management decisions. Despite a growing body of research in this domain, there is a lack of comprehensive literature reviews specifically focused on weed mapping. In particular, the absence of a structured analysis spanning the entire mapping pipeline, from data acquisition to processing techniques and mapping tools, limits progress in the field. This review addresses these gaps by systematically examining state-of-the-art methods in data acquisition (sensor and platform technologies), data processing (including annotation and modelling), and mapping techniques (such as spatiotemporal analysis and decision support tools). Following PRISMA guidelines, we critically evaluate and synthesize key findings from the literature to provide a holistic understanding of the weed mapping landscape. This review serves as a foundational reference to guide future research and support the development of efficient, scalable, and sustainable weed management systems.
Unsupervised Radar Point Cloud Enhancement via Arbitrary LiDAR Guided Diffusion Prior
May 15, 2025In industrial automation, radar is a critical sensor in machine perception. However, the angular resolution of radar is inherently limited by the Rayleigh criterion, which depends on both the radar's operating wavelength and the effective aperture of its antenna array.To overcome these hardware-imposed limitations, recent neural network-based methods have leveraged high-resolution LiDAR data, paired with radar measurements, during training to enhance radar point cloud resolution. While effective, these approaches require extensive paired datasets, which are costly to acquire and prone to calibration error. These challenges motivate the need for methods that can improve radar resolution without relying on paired high-resolution ground-truth data. Here, we introduce an unsupervised radar points enhancement algorithm that employs an arbitrary LiDAR-guided diffusion model as a prior without the need for paired training data. Specifically, our approach formulates radar angle estimation recovery as an inverse problem and incorporates prior knowledge through a diffusion model with arbitrary LiDAR domain knowledge. Experimental results demonstrate that our method attains high fidelity and low noise performance compared to traditional regularization techniques. Additionally, compared to paired training methods, it not only achieves comparable performance but also offers improved generalization capability. To our knowledge, this is the first approach that enhances radar points output by integrating prior knowledge via a diffusion model rather than relying on paired training data. Our code is available at https://github.com/yyxr75/RadarINV.
A Statistical Approach for Synthetic EEG Data Generation
Apr 22, 2025Electroencephalogram (EEG) data is crucial for diagnosing mental health conditions but is costly and time-consuming to collect at scale. Synthetic data generation offers a promising solution to augment datasets for machine learning applications. However, generating high-quality synthetic EEG that preserves emotional and mental health signals remains challenging. This study proposes a method combining correlation analysis and random sampling to generate realistic synthetic EEG data. We first analyze interdependencies between EEG frequency bands using correlation analysis. Guided by this structure, we generate synthetic samples via random sampling. Samples with high correlation to real data are retained and evaluated through distribution analysis and classification tasks. A Random Forest model trained to distinguish synthetic from real EEG performs at chance level, indicating high fidelity. The generated synthetic data closely match the statistical and structural properties of the original EEG, with similar correlation coefficients and no significant differences in PERMANOVA tests. This method provides a scalable, privacy-preserving approach for augmenting EEG datasets, enabling more efficient model training in mental health research.
Can Reasoning LLMs Enhance Clinical Document Classification?
Apr 10, 2025Clinical document classification is essential for converting unstructured medical texts into standardised ICD-10 diagnoses, yet it faces challenges due to complex medical language, privacy constraints, and limited annotated datasets. Large Language Models (LLMs) offer promising improvements in accuracy and efficiency for this task. This study evaluates the performance and consistency of eight LLMs; four reasoning (Qwen QWQ, Deepseek Reasoner, GPT o3 Mini, Gemini 2.0 Flash Thinking) and four non-reasoning (Llama 3.3, GPT 4o Mini, Gemini 2.0 Flash, Deepseek Chat); in classifying clinical discharge summaries using the MIMIC-IV dataset. Using cTAKES to structure clinical narratives, models were assessed across three experimental runs, with majority voting determining final predictions. Results showed that reasoning models outperformed non-reasoning models in accuracy (71% vs 68%) and F1 score (67% vs 60%), with Gemini 2.0 Flash Thinking achieving the highest accuracy (75%) and F1 score (76%). However, non-reasoning models demonstrated greater stability (91% vs 84% consistency). Performance varied across ICD-10 codes, with reasoning models excelling in complex cases but struggling with abstract categories. Findings indicate a trade-off between accuracy and consistency, suggesting that a hybrid approach could optimise clinical coding. Future research should explore multi-label classification, domain-specific fine-tuning, and ensemble methods to enhance model reliability in real-world applications.
NeuroMorse: A Temporally Structured Dataset For Neuromorphic Computing
Feb 28, 2025Neuromorphic engineering aims to advance computing by mimicking the brain's efficient processing, where data is encoded as asynchronous temporal events. This eliminates the need for a synchronisation clock and minimises power consumption when no data is present. However, many benchmarks for neuromorphic algorithms primarily focus on spatial features, neglecting the temporal dynamics that are inherent to most sequence-based tasks. This gap may lead to evaluations that fail to fully capture the unique strengths and characteristics of neuromorphic systems. In this paper, we present NeuroMorse, a temporally structured dataset designed for benchmarking neuromorphic learning systems. NeuroMorse converts the top 50 words in the English language into temporal Morse code spike sequences. Despite using only two input spike channels for Morse dots and dashes, complex information is encoded through temporal patterns in the data. The proposed benchmark contains feature hierarchy at multiple temporal scales that test the capacity of neuromorphic algorithms to decompose input patterns into spatial and temporal hierarchies. We demonstrate that our training set is challenging to categorise using a linear classifier and that identifying keywords in the test set is difficult using conventional methods. The NeuroMorse dataset is available at Zenodo, with our accompanying code on GitHub at https://github.com/Ben-E-Walters/NeuroMorse.
Stabilizing Machine Learning for Reproducible and Explainable Results: A Novel Validation Approach to Subject-Specific Insights
Dec 16, 2024

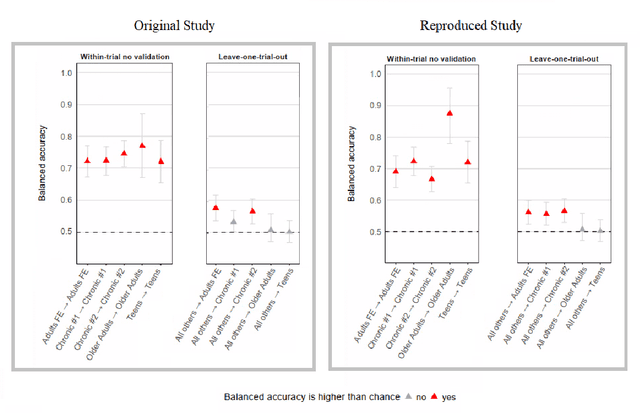

Machine Learning is transforming medical research by improving diagnostic accuracy and personalizing treatments. General ML models trained on large datasets identify broad patterns across populations, but their effectiveness is often limited by the diversity of human biology. This has led to interest in subject-specific models that use individual data for more precise predictions. However, these models are costly and challenging to develop. To address this, we propose a novel validation approach that uses a general ML model to ensure reproducible performance and robust feature importance analysis at both group and subject-specific levels. We tested a single Random Forest (RF) model on nine datasets varying in domain, sample size, and demographics. Different validation techniques were applied to evaluate accuracy and feature importance consistency. To introduce variability, we performed up to 400 trials per subject, randomly seeding the ML algorithm for each trial. This generated 400 feature sets per subject, from which we identified top subject-specific features. A group-specific feature importance set was then derived from all subject-specific results. We compared our approach to conventional validation methods in terms of performance and feature importance consistency. Our repeated trials approach, with random seed variation, consistently identified key features at the subject level and improved group-level feature importance analysis using a single general model. Subject-specific models address biological variability but are resource-intensive. Our novel validation technique provides consistent feature importance and improved accuracy within a general ML model, offering a practical and explainable alternative for clinical research.
Machine Learning for Asymptomatic Ratoon Stunting Disease Detection With Freely Available Satellite Based Multispectral Imaging
Oct 07, 2024Disease detection in sugarcane, particularly the identification of asymptomatic infectious diseases such as Ratoon Stunting Disease (RSD), is critical for effective crop management. This study employed various machine learning techniques to detect the presence of RSD in different sugarcane varieties, using vegetation indices derived from freely available satellite-based spectral data. Our results show that the Support Vector Machine with a Radial Basis Function Kernel (SVM-RBF) was the most effective algorithm, achieving classification accuracy between 85.64% and 96.55%, depending on the variety. Gradient Boosting and Random Forest also demonstrated high performance achieving accuracy between 83.33% to 96.55%, while Logistic Regression and Quadratic Discriminant Analysis showed variable results across different varieties. The inclusion of sugarcane variety and vegetation indices was important in the detection of RSD. This agreed with what was identified in the current literature. Our study highlights the potential of satellite-based remote sensing as a cost-effective and efficient method for large-scale sugarcane disease detection alternative to traditional manual laboratory testing methods.
Learning from the Giants: A Practical Approach to Underwater Depth and Surface Normals Estimation
Oct 02, 2024Monocular Depth and Surface Normals Estimation (MDSNE) is crucial for tasks such as 3D reconstruction, autonomous navigation, and underwater exploration. Current methods rely either on discriminative models, which struggle with transparent or reflective surfaces, or generative models, which, while accurate, are computationally expensive. This paper presents a novel deep learning model for MDSNE, specifically tailored for underwater environments, using a hybrid architecture that integrates Convolutional Neural Networks (CNNs) with Transformers, leveraging the strengths of both approaches. Training effective MDSNE models is often hampered by noisy real-world datasets and the limited generalization of synthetic datasets. To address this, we generate pseudo-labeled real data using multiple pre-trained MDSNE models. To ensure the quality of this data, we propose the Depth Normal Evaluation and Selection Algorithm (DNESA), which evaluates and selects the most reliable pseudo-labeled samples using domain-specific metrics. A lightweight student model is then trained on this curated dataset. Our model reduces parameters by 90% and training costs by 80%, allowing real-time 3D perception on resource-constrained devices. Key contributions include: a novel and efficient MDSNE model, the DNESA algorithm, a domain-specific data pipeline, and a focus on real-time performance and scalability. Designed for real-world underwater applications, our model facilitates low-cost deployments in underwater robots and autonomous vehicles, bridging the gap between research and practical implementation.
Semi-Supervised Weed Detection for Rapid Deployment and Enhanced Efficiency
May 12, 2024



Weeds present a significant challenge in agriculture, causing yield loss and requiring expensive control measures. Automatic weed detection using computer vision and deep learning offers a promising solution. However, conventional deep learning methods often require large amounts of labelled training data, which can be costly and time-consuming to acquire. This paper introduces a novel method for semi-supervised weed detection, comprising two main components. Firstly, a multi-scale feature representation technique is employed to capture distinctive weed features across different scales. Secondly, we propose an adaptive pseudo-label assignment strategy, leveraging a small set of labelled images during training. This strategy dynamically assigns confidence scores to pseudo-labels generated from unlabeled data. Additionally, our approach integrates epoch-corresponding and mixed pseudo-labels to further enhance the learning process. Experimental results on the COCO dataset and five prominent weed datasets -- CottonWeedDet12, CropAndWeed, Palmer amaranth, RadishWheat, and RoboWeedMap -- illustrate that our method achieves state-of-the-art performance in weed detection, even with significantly less labelled data compared to existing techniques. This approach holds the potential to alleviate the labelling burden and enhance the feasibility and deployment speed of deep learning for weed detection in real-world agricultural scenarios.