 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise Robotic Weed Spot-Spraying for Reduced Herbicide Usage and Improved Environmental Outcomes -- A Real-World Case Study
Jan 25, 2024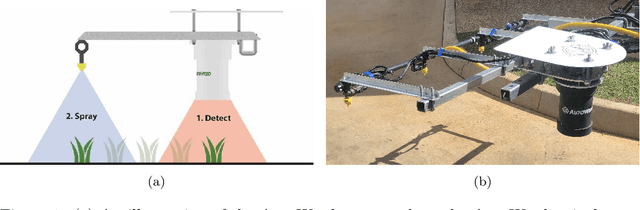



Precise robotic weed control plays an essential role in precision agriculture. It can help significantly reduce the environmental impact of herbicides while reducing weed management costs for farmers. In this paper, we demonstrate that a custom-designed robotic spot spraying tool based on computer vision and deep learning can significantly reduce herbicide usage on sugarcane farms. We present results from field trials that compare robotic spot spraying against industry-standard broadcast spraying, by measuring the weed control efficacy, the reduction in herbicide usage, and the water quality improvements in irrigation runoff. The average results across 25 hectares of field trials show that spot spraying on sugarcane farms is 97% as effective as broadcast spraying and reduces herbicide usage by 35%, proportionally to the weed density. For specific trial strips with lower weed pressure, spot spraying reduced herbicide usage by up to 65%. Water quality measurements of irrigation-induced runoff, three to six days after spraying, showed reductions in the mean concentration and mean load of herbicides of 39% and 54%, respectively, compared to broadcast spraying. These promising results reveal the capability of spot spraying technology to reduce herbicide usage on sugarcane farms without impacting weed control and potentially providing sustained water quality benefits.
DeepWeeds: A Multiclass Weed Species Image Dataset for Deep Learning
Oct 09, 2018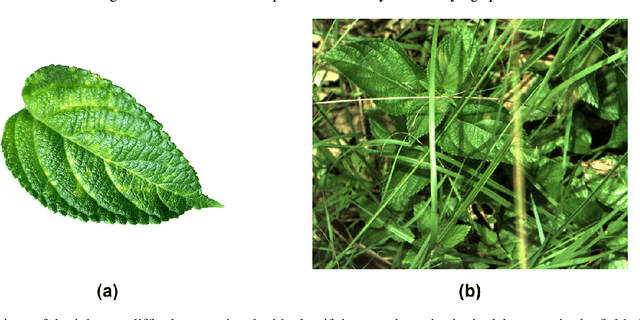


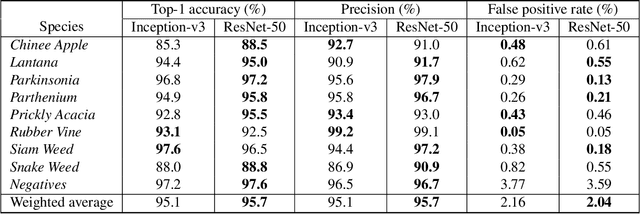
Robotic weed control has seen increased research in the past decade with its potential for boosting productivity in agriculture. Majority of works focus on developing robotics for arable croplands, ignoring the significant weed management problems facing rangeland stock farmers. Perhaps the greatest obstacle to widespread uptake of robotic weed control is the robust detection of weed species in their natural environment. The unparalleled successes of deep learning make it an ideal candidate for recognising various weed species in the highly complex Australian rangeland environment. This work contributes the first large, public, multiclass image dataset of weed species from the Australian rangelands; allowing for the development of robust detection methods to make robotic weed control viable. The DeepWeeds dataset consists of 17,509 labelled images of eight nationally significant weed species native to eight locations across northern Australia. This paper also presents a baseline for classification performance on the dataset using the benchmark deep learning models, Inception-v3 and ResNet-50. These models achieved an average classification performance of 87.9% and 90.5%, respectively. This strong result bodes well for future field implementation of robotic weed control methods in the Australian rangelands.