 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-Supervised Weed Detection for Rapid Deployment and Enhanced Efficiency
May 12, 2024



Weeds present a significant challenge in agriculture, causing yield loss and requiring expensive control measures. Automatic weed detection using computer vision and deep learning offers a promising solution. However, conventional deep learning methods often require large amounts of labelled training data, which can be costly and time-consuming to acquire. This paper introduces a novel method for semi-supervised weed detection, comprising two main components. Firstly, a multi-scale feature representation technique is employed to capture distinctive weed features across different scales. Secondly, we propose an adaptive pseudo-label assignment strategy, leveraging a small set of labelled images during training. This strategy dynamically assigns confidence scores to pseudo-labels generated from unlabeled data. Additionally, our approach integrates epoch-corresponding and mixed pseudo-labels to further enhance the learning process. Experimental results on the COCO dataset and five prominent weed datasets -- CottonWeedDet12, CropAndWeed, Palmer amaranth, RadishWheat, and RoboWeedMap -- illustrate that our method achieves state-of-the-art performance in weed detection, even with significantly less labelled data compared to existing techniques. This approach holds the potential to alleviate the labelling burden and enhance the feasibility and deployment speed of deep learning for weed detection in real-world agricultural scenarios.
ShadowRemovalNet: Efficient Real-Time Shadow Removal
Mar 13, 2024Shadows significantly impact computer vision tasks, particularly in outdoor environments. State-of-the-art shadow removal methods are typically too computationally intensive for real-time image processing on edge hardware. We propose ShadowRemovalNet, a novel method designed for real-time image processing on resource-constrained hardware. ShadowRemovalNet achieves significantly higher frame rates compared to existing methods, making it suitable for real-time computer vision pipelines like those used in field robotics. Beyond speed, ShadowRemovalNet offers advantages in efficiency and simplicity, as it does not require a separate shadow mask during inference. ShadowRemovalNet also addresses challenges associated with Generative Adversarial Networks (GANs) for shadow removal, including artefacts, inaccurate mask estimations, and inconsistent supervision between shadow and boundary pixels. To address these limitations, we introduce a novel loss function that substantially reduces shadow removal errors. ShadowRemovalNet's efficiency and straightforwardness make it a robust and effective solution for real-time shadow removal in outdoor robotics and edge computing applications.
Precise Robotic Weed Spot-Spraying for Reduced Herbicide Usage and Improved Environmental Outcomes -- A Real-World Case Study
Jan 25, 2024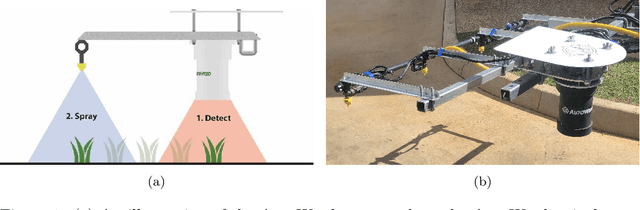



Precise robotic weed control plays an essential role in precision agriculture. It can help significantly reduce the environmental impact of herbicides while reducing weed management costs for farmers. In this paper, we demonstrate that a custom-designed robotic spot spraying tool based on computer vision and deep learning can significantly reduce herbicide usage on sugarcane farms. We present results from field trials that compare robotic spot spraying against industry-standard broadcast spraying, by measuring the weed control efficacy, the reduction in herbicide usage, and the water quality improvements in irrigation runoff. The average results across 25 hectares of field trials show that spot spraying on sugarcane farms is 97% as effective as broadcast spraying and reduces herbicide usage by 35%, proportionally to the weed density. For specific trial strips with lower weed pressure, spot spraying reduced herbicide usage by up to 65%. Water quality measurements of irrigation-induced runoff, three to six days after spraying, showed reductions in the mean concentration and mean load of herbicides of 39% and 54%, respectively, compared to broadcast spraying. These promising results reveal the capability of spot spraying technology to reduce herbicide usage on sugarcane farms without impacting weed control and potentially providing sustained water quality benefits.
WeedCLR: Weed Contrastive Learning through Visual Representations with Class-Optimized Loss in Long-Tailed Datasets
Oct 19, 2023Image classification is a crucial task in modern weed management and crop intervention technologies. However, the limited size, diversity, and balance of existing weed datasets hinder the development of deep learning models for generalizable weed identification. In addition, the expensive labelling requirements of mainstream fully-supervised weed classifiers make them cost- and time-prohibitive to deploy widely, for new weed species, and in site-specific weed management. This paper proposes a novel method for Weed Contrastive Learning through visual Representations (WeedCLR), that uses class-optimized loss with Von Neumann Entropy of deep representation for weed classification in long-tailed datasets. WeedCLR leverages self-supervised learning to learn rich and robust visual features without any labels and applies a class-optimized loss function to address the class imbalance problem in long-tailed datasets. WeedCLR is evaluated on two public weed datasets: CottonWeedID15, containing 15 weed species, and DeepWeeds, containing 8 weed species. WeedCLR achieves an average accuracy improvement of 4.3\% on CottonWeedID15 and 5.6\% on DeepWeeds over previous methods. It also demonstrates better generalization ability and robustness to different environmental conditions than existing methods without the need for expensive and time-consuming human annotations. These significant improvements make WeedCLR an effective tool for weed classification in long-tailed datasets and allows for more rapid and widespread deployment of site-specific weed management and crop intervention technologies.