 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeamformed 360° Sound Maps: U-Net-Driven Acoustic Source Segmentation and Localization
Aug 01, 2025We introduce a U-net model for 360{\deg} acoustic source localization formulated as a spherical semantic segmentation task. Rather than regressing discrete direction-of-arrival (DoA) angles, our model segments beamformed audio maps (azimuth and elevation) into regions of active sound presence. Using delay-and-sum (DAS) beamforming on a custom 24-microphone array, we generate signals aligned with drone GPS telemetry to create binary supervision masks. A modified U-Net, trained on frequency-domain representations of these maps, learns to identify spatially distributed source regions while addressing class imbalance via the Tversky loss. Because the network operates on beamformed energy maps, the approach is inherently array-independent and can adapt to different microphone configurations without retraining from scratch. The segmentation outputs are post-processed by computing centroids over activated regions, enabling robust DoA estimates. Our dataset includes real-world open-field recordings of a DJI Air 3 drone, synchronized with 360{\deg} video and flight logs across multiple dates and locations. Experimental results show that U-net generalizes across environments, providing improved angular precision, offering a new paradigm for dense spatial audio understanding beyond traditional Sound Source Localization (SSL).
Predictive Maintenance Model Based on Anomaly Detection in Induction Motors: A Machine Learning Approach Using Real-Time IoT Data
Oct 15, 2023


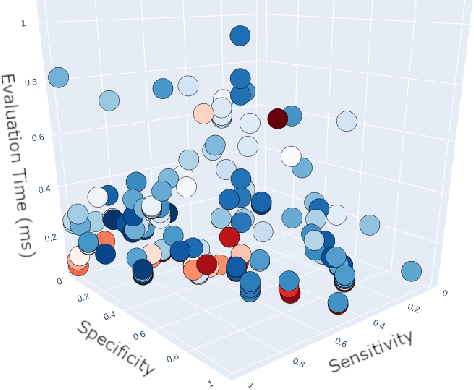
With the support of Internet of Things (IoT) devices, it is possible to acquire data from degradation phenomena and design data-driven models to perform anomaly detection in industrial equipment. This approach not only identifies potential anomalies but can also serve as a first step toward building predictive maintenance policies. In this work, we demonstrate a novel anomaly detection system on induction motors used in pumps, compressors, fans, and other industrial machines. This work evaluates a combination of pre-processing techniques and machine learning (ML) models with a low computational cost. We use a combination of pre-processing techniques such as Fast Fourier Transform (FFT), Wavelet Transform (WT), and binning, which are well-known approaches for extracting features from raw data. We also aim to guarantee an optimal balance between multiple conflicting parameters, such as anomaly detection rate, false positive rate, and inference speed of the solution. To this end, multiobjective optimization and analysis are performed on the evaluated models. Pareto-optimal solutions are presented to select which models have the best results regarding classification metrics and computational effort. Differently from most works in this field that use publicly available datasets to validate their models, we propose an end-to-end solution combining low-cost and readily available IoT sensors. The approach is validated by acquiring a custom dataset from induction motors. Also, we fuse vibration, temperature, and noise data from these sensors as the input to the proposed ML model. Therefore, we aim to propose a methodology general enough to be applied in different industrial contexts in the future.
A Neuromorphic Architecture for Reinforcement Learning from Real-Valued Observations
Jul 06, 2023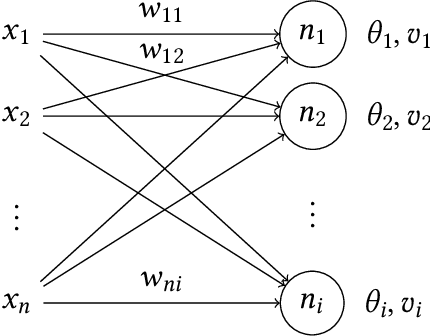
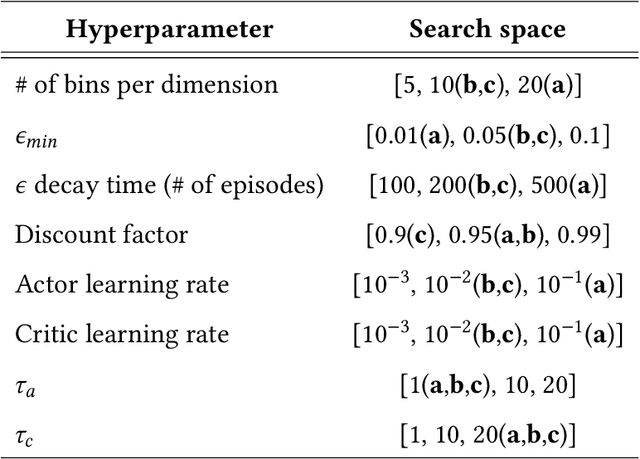
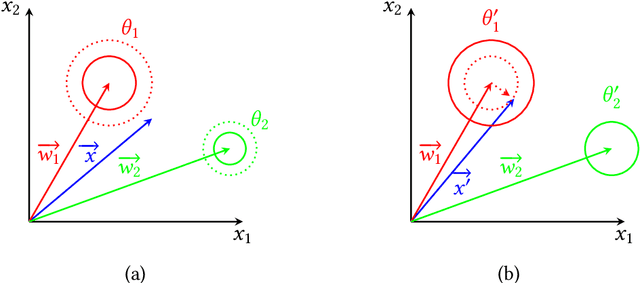
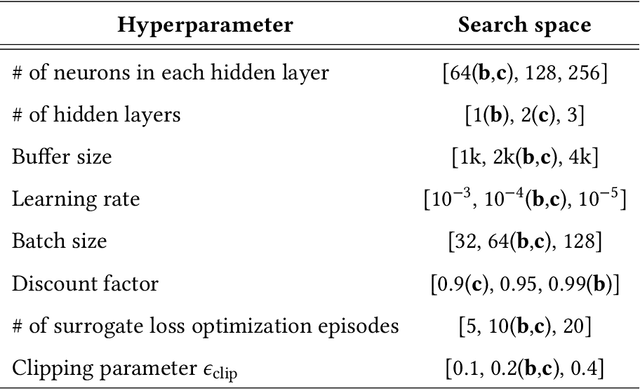
Reinforcement Learning (RL) provides a powerful framework for decision-making in complex environments. However, implementing RL in hardware-efficient and bio-inspired ways remains a challenge. This paper presents a novel Spiking Neural Network (SNN) architecture for solving RL problems with real-valued observations. The proposed model incorporates multi-layered event-based clustering, with the addition of Temporal Difference (TD)-error modulation and eligibility traces, building upon prior work. An ablation study confirms the significant impact of these components on the proposed model's performance. A tabular actor-critic algorithm with eligibility traces and a state-of-the-art Proximal Policy Optimization (PPO) algorithm are used as benchmarks. Our network consistently outperforms the tabular approach and successfully discovers stable control policies on classic RL environments: mountain car, cart-pole, and acrobot. The proposed model offers an appealing trade-off in terms of computational and hardware implementation requirements. The model does not require an external memory buffer nor a global error gradient computation, and synaptic updates occur online, driven by local learning rules and a broadcasted TD-error signal. Thus, this work contributes to the development of more hardware-efficient RL solutions.