 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParisKV: Fast and Drift-Robust KV-Cache Retrieval for Long-Context LLMs
Feb 07, 2026KV-cache retrieval is essential for long-context LLM inference, yet existing methods struggle with distribution drift and high latency at scale. We introduce ParisKV, a drift-robust, GPU-native KV-cache retrieval framework based on collision-based candidate selection, followed by a quantized inner-product reranking estimator. For million-token contexts, ParisKV supports CPU-offloaded KV caches via Unified Virtual Addressing (UVA), enabling on-demand top-$k$ fetching with minimal overhead. ParisKV matches or outperforms full attention quality on long-input and long-generation benchmarks. It achieves state-of-the-art long-context decoding efficiency: it matches or exceeds full attention speed even at batch size 1 for long contexts, delivers up to 2.8$\times$ higher throughput within full attention's runnable range, and scales to million-token contexts where full attention runs out of memory. At million-token scale, ParisKV reduces decode latency by 17$\times$ and 44$\times$ compared to MagicPIG and PQCache, respectively, two state-of-the-art KV-cache Top-$k$ retrieval baselines.
LEAD: Iterative Data Selection for Efficient LLM Instruction Tuning
May 12, 2025Instruction tuning has emerged as a critical paradigm for improving the capabilities and alignment of large language models (LLMs). However, existing iterative model-aware data selection methods incur significant computational overhead, as they rely on repeatedly performing full-dataset model inference to estimate sample utility for subsequent training iterations, creating a fundamental efficiency bottleneck. In this paper, we propose LEAD, an efficient iterative data selection framework that accurately estimates sample utility entirely within the standard training loop, eliminating the need for costly additional model inference. At its core, LEAD introduces Instance-Level Dynamic Uncertainty (IDU), a theoretically grounded utility function combining instantaneous training loss, gradient-based approximation of loss changes, and exponential smoothing of historical loss signals. To further scale efficiently to large datasets, LEAD employs a two-stage, coarse-to-fine selection strategy, adaptively prioritizing informative clusters through a multi-armed bandit mechanism, followed by precise fine-grained selection of high-utility samples using IDU. Extensive experiments across four diverse benchmarks show that LEAD significantly outperforms state-of-the-art methods, improving average model performance by 6.1%-10.8% while using only 2.5% of the training data and reducing overall training time by 5-10x.
TorchSpatial: A Location Encoding Framework and Benchmark for Spatial Representation Learning
Jun 21, 2024Spatial representation learning (SRL) aims at learning general-purpose neural network representations from various types of spatial data (e.g., points, polylines, polygons, networks, images, etc.) in their native formats. Learning good spatial representations is a fundamental problem for various downstream applications such as species distribution modeling, weather forecasting, trajectory generation, geographic question answering, etc. Even though SRL has become the foundation of almost all geospatial artificial intelligence (GeoAI) research, we have not yet seen significant efforts to develop an extensive deep learning framework and benchmark to support SRL model development and evaluation. To fill this gap, we propose TorchSpatial, a learning framework and benchmark for location (point) encoding, which is one of the most fundamental data types of spatial representation learning. TorchSpatial contains three key components: 1) a unified location encoding framework that consolidates 15 commonly recognized location encoders, ensuring scalability and reproducibility of the implementations; 2) the LocBench benchmark tasks encompassing 7 geo-aware image classification and 4 geo-aware image regression datasets; 3) a comprehensive suite of evaluation metrics to quantify geo-aware models' overall performance as well as their geographic bias, with a novel Geo-Bias Score metric. Finally, we provide a detailed analysis and insights into the model performance and geographic bias of different location encoders. We believe TorchSpatial will foster future advancement of spatial representation learning and spatial fairness in GeoAI research. The TorchSpatial model framework, LocBench, and Geo-Bias Score evaluation framework are available at https://github.com/seai-lab/TorchSpatial.
Enabling CMF Estimation in Data-Constrained Scenarios: A Semantic-Encoding Knowledge Mining Model
Nov 15, 2023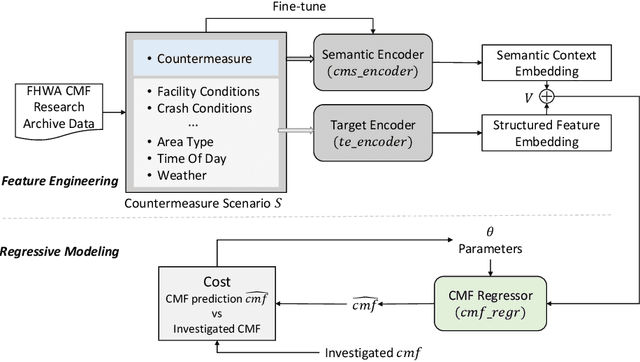

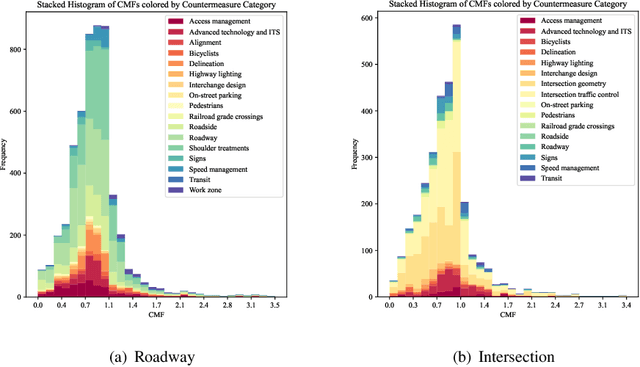
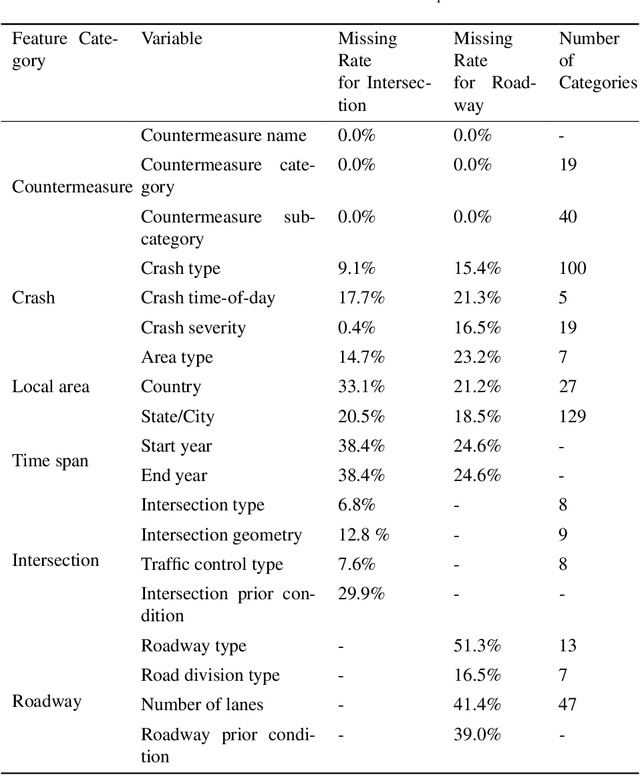
Precise estimation of Crash Modification Factors (CMFs) is central to evaluating the effectiveness of various road safety treatments and prioritizing infrastructure investment accordingly. While customized study for each countermeasure scenario is desired, the conventional CMF estimation approaches rely heavily on the availability of crash data at given sites. This not only makes the estimation costly, but the results are also less transferable, since the intrinsic similarities between different safety countermeasure scenarios are not fully explored. Aiming to fill this gap, this study introduces a novel knowledge-mining framework for CMF prediction. This framework delves into the connections of existing countermeasures and reduces the reliance of CMF estimation on crash data availability and manual data collection. Specifically, it draws inspiration from human comprehension processes and introduces advanced Natural Language Processing (NLP) techniques to extract intricate variations and patterns from existing CMF knowledge. It effectively encodes unstructured countermeasure scenarios into machine-readable representations and models the complex relationships between scenarios and CMF values. This new data-driven framework provides a cost-effective and adaptable solution that complements the case-specific approaches for CMF estimation, which is particularly beneficial when availability of crash data or time imposes constraints. Experimental validation using real-world CMF Clearinghouse data demonstrates the effectiveness of this new approach, which shows significant accuracy improvements compared to baseline methods. This approach provides insights into new possibilities of harnessing accumulated transportation knowledge in various applications.
EVKG: An Interlinked and Interoperable Electric Vehicle Knowledge Graph for Smart Transportation System
Apr 10, 2023Over the past decade, the electric vehicle industry has experienced unprecedented growth and diversification, resulting in a complex ecosystem. To effectively manage this multifaceted field, we present an EV-centric knowledge graph (EVKG) as a comprehensive, cross-domain, extensible, and open geospatial knowledge management system. The EVKG encapsulates essential EV-related knowledge, including EV adoption, electric vehicle supply equipment, and electricity transmission network, to support decision-making related to EV technology development, infrastructure planning, and policy-making by providing timely and accurate information and analysis. To enrich and contextualize the EVKG, we integrate the developed EV-relevant ontology modules from existing well-known knowledge graphs and ontologies. This integration enables interoperability with other knowledge graphs in the Linked Data Open Cloud, enhancing the EVKG's value as a knowledge hub for EV decision-making. Using six competency questions, we demonstrate how the EVKG can be used to answer various types of EV-related questions, providing critical insights into the EV ecosystem. Our EVKG provides an efficient and effective approach for managing the complex and diverse EV industry. By consolidating critical EV-related knowledge into a single, easily accessible resource, the EVKG supports decision-makers in making informed choices about EV technology development, infrastructure planning, and policy-making. As a flexible and extensible platform, the EVKG is capable of accommodating a wide range of data sources, enabling it to evolve alongside the rapidly changing EV landscape.