 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation and Inference for Causal Functions with Multiway Clustered Data
Sep 10, 2024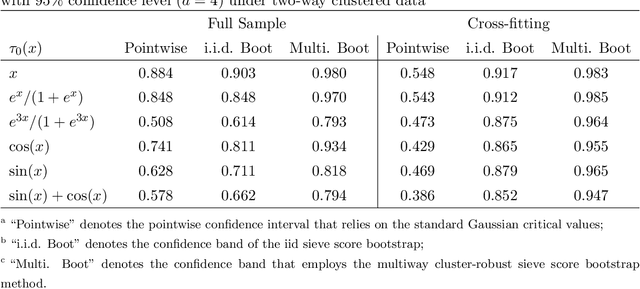
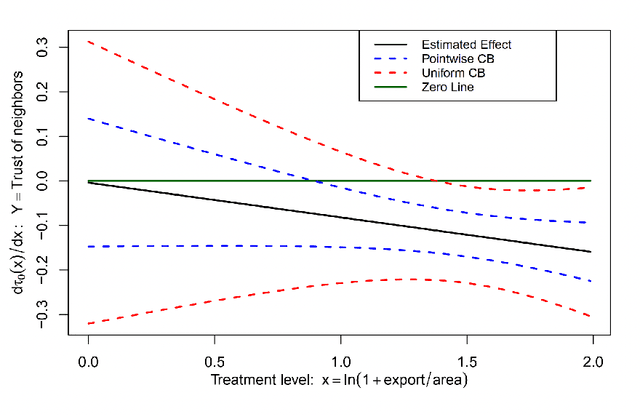
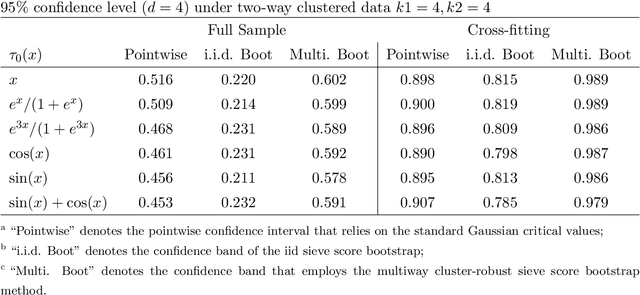
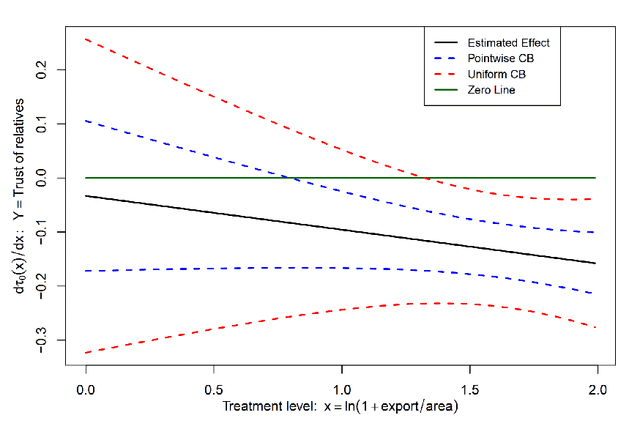
This paper proposes methods of estimation and uniform inference for a general class of causal functions, such as the conditional average treatment effects and the continuous treatment effects, under multiway clustering. The causal function is identified as a conditional expectation of an adjusted (Neyman-orthogonal) signal that depends on high-dimensional nuisance parameters. We propose a two-step procedure where the first step uses machine learning to estimate the high-dimensional nuisance parameters. The second step projects the estimated Neyman-orthogonal signal onto a dictionary of basis functions whose dimension grows with the sample size. For this two-step procedure, we propose both the full-sample and the multiway cross-fitting estimation approaches. A functional limit theory is derived for these estimators. To construct the uniform confidence bands, we develop a novel resampling procedure, called the multiway cluster-robust sieve score bootstrap, that extends the sieve score bootstrap (Chen and Christensen, 2018) to the novel setting with multiway clustering. Extensive numerical simulations showcase that our methods achieve desirable finite-sample behaviors. We apply the proposed methods to analyze the causal relationship between mistrust levels in Africa and the historical slave trade. Our analysis rejects the null hypothesis of uniformly zero effects and reveals heterogeneous treatment effects, with significant impacts at higher levels of trade volumes.
RMMDet: Road-Side Multitype and Multigroup Sensor Detection System for Autonomous Driving
Mar 10, 2023Autonomous driving has now made great strides thanks to artificial intelligence, and numerous advanced methods have been proposed for vehicle end target detection, including single sensor or multi sensor detection methods. However, the complexity and diversity of real traffic situations necessitate an examination of how to use these methods in real road conditions. In this paper, we propose RMMDet, a road-side multitype and multigroup sensor detection system for autonomous driving. We use a ROS-based virtual environment to simulate real-world conditions, in particular the physical and functional construction of the sensors. Then we implement muti-type sensor detection and multi-group sensors fusion in this environment, including camera-radar and camera-lidar detection based on result-level fusion. We produce local datasets and real sand table field, and conduct various experiments. Furthermore, we link a multi-agent collaborative scheduling system to the fusion detection system. Hence, the whole roadside detection system is formed by roadside perception, fusion detection, and scheduling planning. Through the experiments, it can be seen that RMMDet system we built plays an important role in vehicle-road collaboration and its optimization. The code and supplementary materials can be found at: https://github.com/OrangeSodahub/RMMDet
Position-enhanced and Time-aware Graph Convolutional Network for Sequential Recommendations
Jul 12, 2021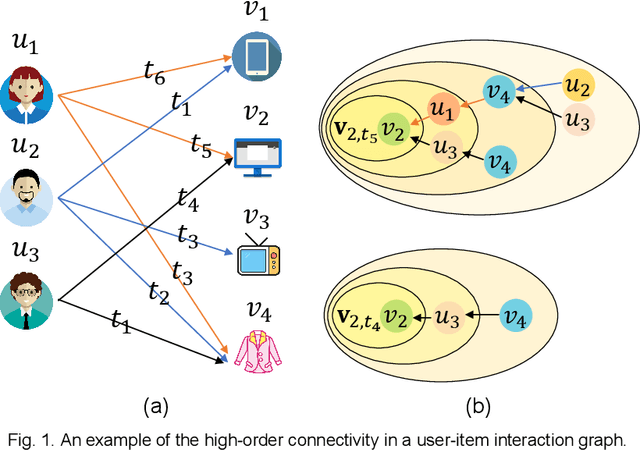
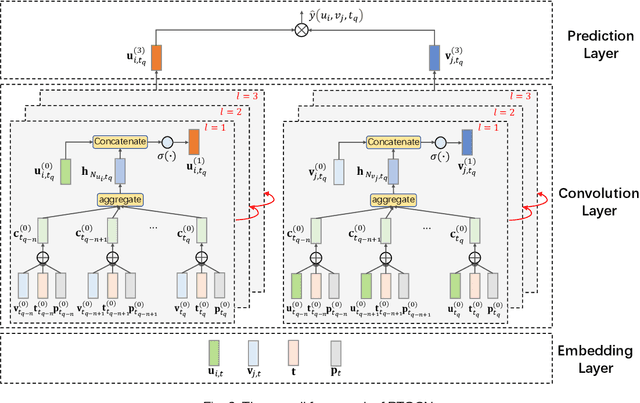

Most of the existing deep learning-based sequential recommendation approaches utilize the recurrent neural network architecture or self-attention to model the sequential patterns and temporal influence among a user's historical behavior and learn the user's preference at a specific time. However, these methods have two main drawbacks. First, they focus on modeling users' dynamic states from a user-centric perspective and always neglect the dynamics of items over time. Second, most of them deal with only the first-order user-item interactions and do not consider the high-order connectivity between users and items, which has recently been proved helpful for the sequential recommendation. To address the above problems, in this article, we attempt to model user-item interactions by a bipartite graph structure and propose a new recommendation approach based on a Position-enhanced and Time-aware Graph Convolutional Network (PTGCN) for the sequential recommendation. PTGCN models the sequential patterns and temporal dynamics between user-item interactions by defining a position-enhanced and time-aware graph convolution operation and learning the dynamic representations of users and items simultaneously on the bipartite graph with a self-attention aggregator. Also, it realizes the high-order connectivity between users and items by stacking multi-layer graph convolutions. To demonstrate the effectiveness of PTGCN, we carried out a comprehensive evaluation of PTGCN on three real-world datasets of different sizes compared with a few competitive baselines. Experimental results indicate that PTGCN outperforms several state-of-the-art models in terms of two commonly-used evaluation metrics for ranking.