 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCloud-Edge Collaborative Large Models for Robust Photovoltaic Power Forecasting
Mar 25, 2026Photovoltaic (PV) power forecasting in edge-enabled grids requires balancing forecasting accuracy, robustness under weather-driven distribution shifts, and strict latency constraints. Existing models work well under normal conditions but often struggle with rare ramp events and unexpected weather changes. Relying solely on cloud-based large models often leads to significant communication delays, which can hinder timely and efficient forecasting in practical grid environments. To address these issues, we propose a condition-adaptive cloud-edge collaborative framework *CAPE* for PV forecasting. *CAPE* consists of three main modules: a site-specific expert model for routine predictions, a lightweight edge-side model for enhanced local inference, and a cloud-based large retrieval model that provides relevant historical cases when needed. These modules are coordinated by a screening module that evaluates uncertainty, out-of-distribution risk, weather mutations, and model disagreement. Furthermore, we employ a Lyapunov-guided routing strategy to dynamically determine when to escalate inference to more powerful models under long-term system constraints. The final forecast is produced through adaptive fusion of the selected model outputs. Experiments on two real-world PV datasets demonstrate that *CAPE* achieves superior performance in terms of forecasting accuracy, robustness, routing quality, and system efficiency.
Context Learning for Multi-Agent Discussion
Feb 02, 2026Multi-Agent Discussion (MAD) has garnered increasing attention very recently, where multiple LLM instances collaboratively solve problems via structured discussion. However, we find that current MAD methods easily suffer from discussion inconsistency, LLMs fail to reach a coherent solution, due to the misalignment between their individual contexts.In this paper, we introduce a multi-LLM context learning method (M2CL) that learns a context generator for each agent, capable of dynamically generating context instructions per discussion round via automatic information organization and refinement. Specifically, inspired by our theoretical insights on the context instruction, M2CL train the generators to control context coherence and output discrepancies via a carefully crafted self-adaptive mechanism.It enables LLMs to avoid premature convergence on majority noise and progressively reach the correct consensus. We evaluate M2CL on challenging tasks, including academic reasoning, embodied tasks, and mobile control. The results show that the performance of M2CL significantly surpasses existing methods by 20%--50%, while enjoying favorable transferability and computational efficiency.
How to Leverage Diverse Demonstrations in Offline Imitation Learning
May 29, 2024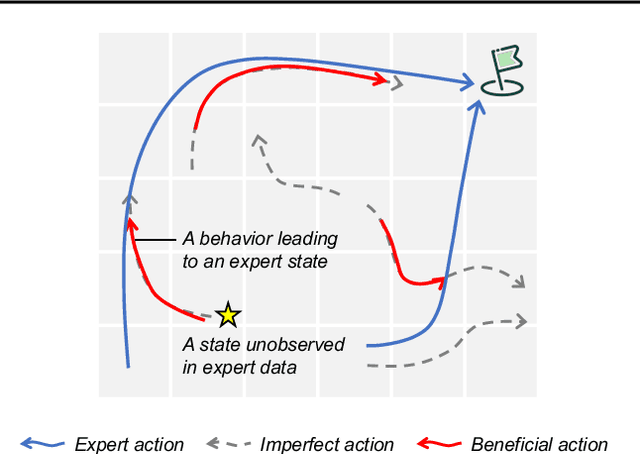
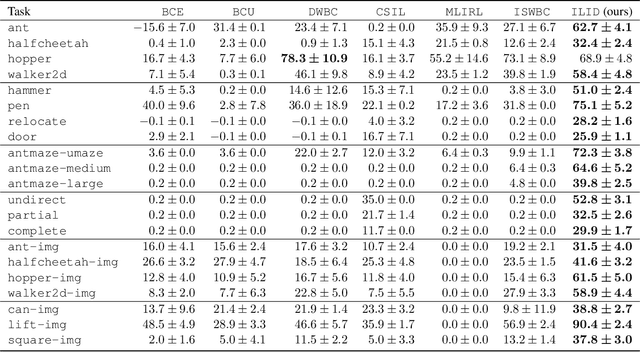
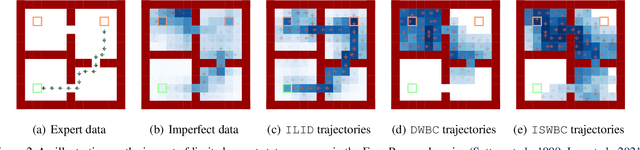
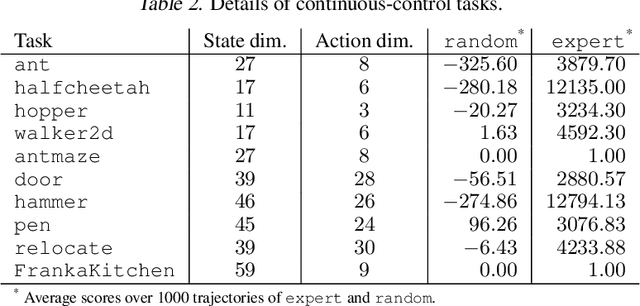
Offline Imitation Learning (IL) with imperfect demonstrations has garnered increasing attention owing to the scarcity of expert data in many real-world domains. A fundamental problem in this scenario is how to extract positive behaviors from noisy data. In general, current approaches to the problem select data building on state-action similarity to given expert demonstrations, neglecting precious information in (potentially abundant) $\textit{diverse}$ state-actions that deviate from expert ones. In this paper, we introduce a simple yet effective data selection method that identifies positive behaviors based on their resultant states -- a more informative criterion enabling explicit utilization of dynamics information and effective extraction of both expert and beneficial diverse behaviors. Further, we devise a lightweight behavior cloning algorithm capable of leveraging the expert and selected data correctly. In the experiments, we evaluate our method on a suite of complex and high-dimensional offline IL benchmarks, including continuous-control and vision-based tasks. The results demonstrate that our method achieves state-of-the-art performance, outperforming existing methods on $\textbf{20/21}$ benchmarks, typically by $\textbf{2-5x}$, while maintaining a comparable runtime to Behavior Cloning ($\texttt{BC}$).
Momentum-Based Federated Reinforcement Learning with Interaction and Communication Efficiency
May 29, 2024
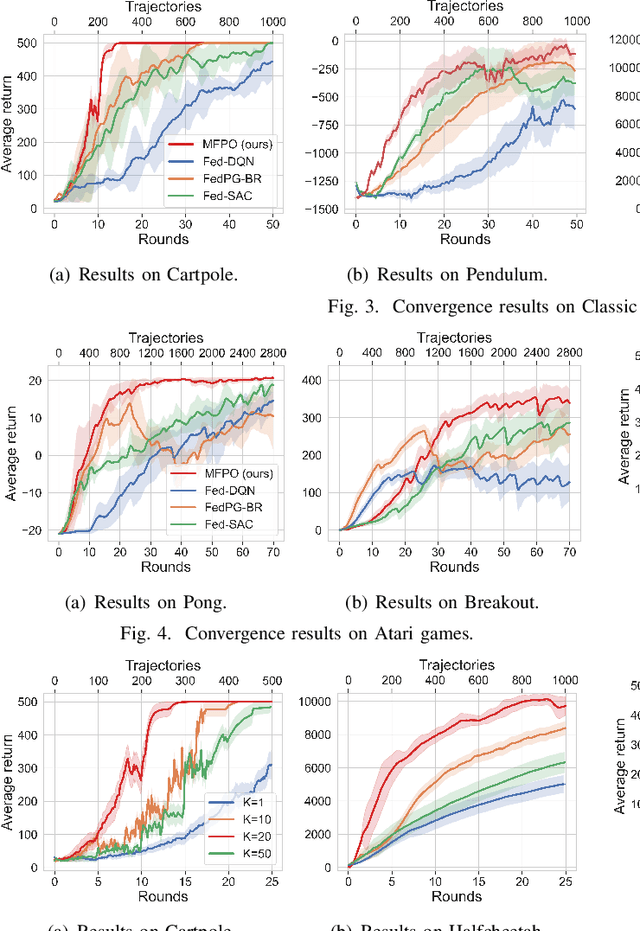
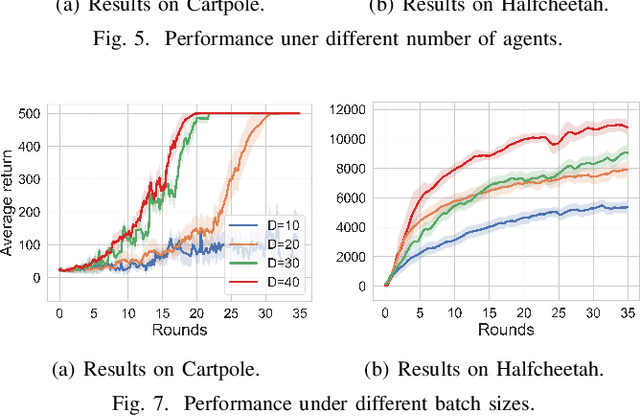
Federated Reinforcement Learning (FRL) has garnered increasing attention recently. However, due to the intrinsic spatio-temporal non-stationarity of data distributions, the current approaches typically suffer from high interaction and communication costs. In this paper, we introduce a new FRL algorithm, named $\texttt{MFPO}$, that utilizes momentum, importance sampling, and additional server-side adjustment to control the shift of stochastic policy gradients and enhance the efficiency of data utilization. We prove that by proper selection of momentum parameters and interaction frequency, $\texttt{MFPO}$ can achieve $\tilde{\mathcal{O}}(H N^{-1}\epsilon^{-3/2})$ and $\tilde{\mathcal{O}}(\epsilon^{-1})$ interaction and communication complexities ($N$ represents the number of agents), where the interaction complexity achieves linear speedup with the number of agents, and the communication complexity aligns the best achievable of existing first-order FL algorithms. Extensive experiments corroborate the substantial performance gains of $\texttt{MFPO}$ over existing methods on a suite of complex and high-dimensional benchmarks.
OLLIE: Imitation Learning from Offline Pretraining to Online Finetuning
May 29, 2024



In this paper, we study offline-to-online Imitation Learning (IL) that pretrains an imitation policy from static demonstration data, followed by fast finetuning with minimal environmental interaction. We find the na\"ive combination of existing offline IL and online IL methods tends to behave poorly in this context, because the initial discriminator (often used in online IL) operates randomly and discordantly against the policy initialization, leading to misguided policy optimization and $\textit{unlearning}$ of pretraining knowledge. To overcome this challenge, we propose a principled offline-to-online IL method, named $\texttt{OLLIE}$, that simultaneously learns a near-expert policy initialization along with an $\textit{aligned discriminator initialization}$, which can be seamlessly integrated into online IL, achieving smooth and fast finetuning. Empirically, $\texttt{OLLIE}$ consistently and significantly outperforms the baseline methods in $\textbf{20}$ challenging tasks, from continuous control to vision-based domains, in terms of performance, demonstration efficiency, and convergence speed. This work may serve as a foundation for further exploration of pretraining and finetuning in the context of IL.
Federated Offline Policy Optimization with Dual Regularization
May 29, 2024Federated Reinforcement Learning (FRL) has been deemed as a promising solution for intelligent decision-making in the era of Artificial Internet of Things. However, existing FRL approaches often entail repeated interactions with the environment during local updating, which can be prohibitively expensive or even infeasible in many real-world domains. To overcome this challenge, this paper proposes a novel offline federated policy optimization algorithm, named $\texttt{DRPO}$, which enables distributed agents to collaboratively learn a decision policy only from private and static data without further environmental interactions. $\texttt{DRPO}$ leverages dual regularization, incorporating both the local behavioral policy and the global aggregated policy, to judiciously cope with the intrinsic two-tier distributional shifts in offline FRL. Theoretical analysis characterizes the impact of the dual regularization on performance, demonstrating that by achieving the right balance thereof, $\texttt{DRPO}$ can effectively counteract distributional shifts and ensure strict policy improvement in each federative learning round. Extensive experiments validate the significant performance gains of $\texttt{DRPO}$ over baseline methods.