 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepPointMap: Advancing LiDAR SLAM with Unified Neural Descriptors
Dec 05, 2023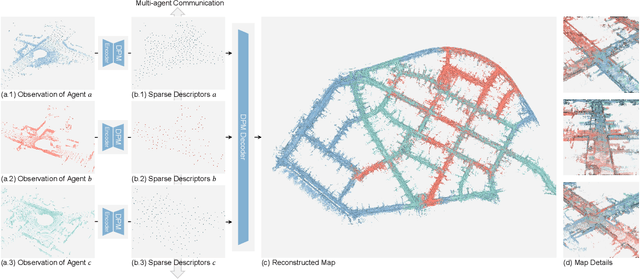
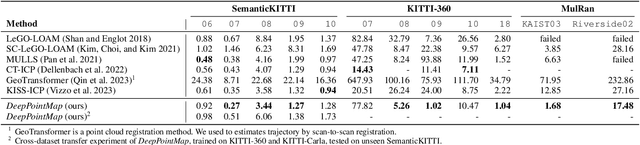
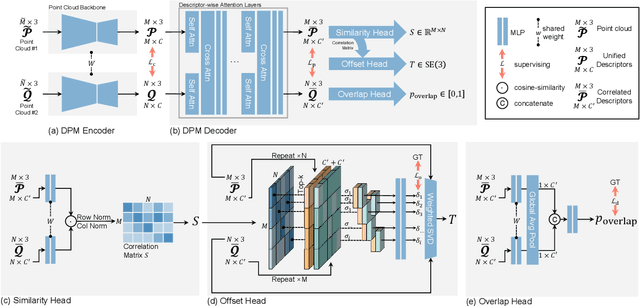
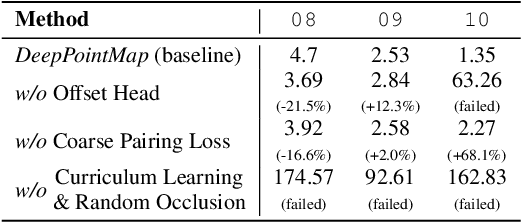
Point clouds have shown significant potential in various domains, including Simultaneous Localization and Mapping (SLAM). However, existing approaches either rely on dense point clouds to achieve high localization accuracy or use generalized descriptors to reduce map size. Unfortunately, these two aspects seem to conflict with each other. To address this limitation, we propose a unified architecture, DeepPointMap, achieving excellent preference on both aspects. We utilize neural network to extract highly representative and sparse neural descriptors from point clouds, enabling memory-efficient map representation and accurate multi-scale localization tasks (e.g., odometry and loop-closure). Moreover, we showcase the versatility of our framework by extending it to more challenging multi-agent collaborative SLAM. The promising results obtained in these scenarios further emphasize the effectiveness and potential of our approach.
Learned Smartphone ISP on Mobile GPUs with Deep Learning, Mobile AI & AIM 2022 Challenge: Report
Nov 07, 2022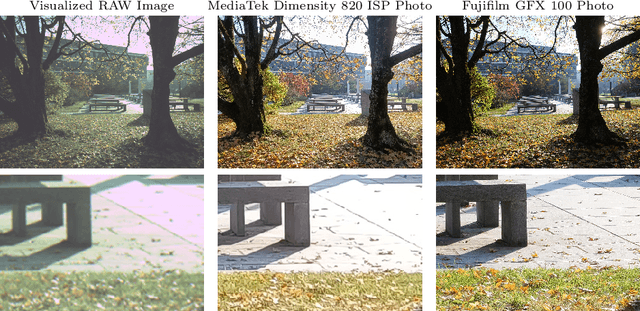
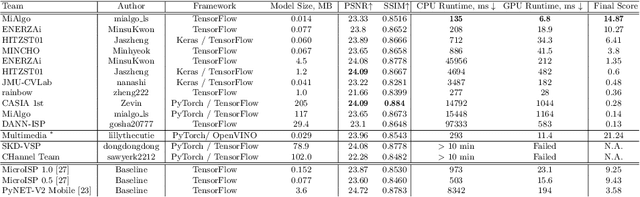
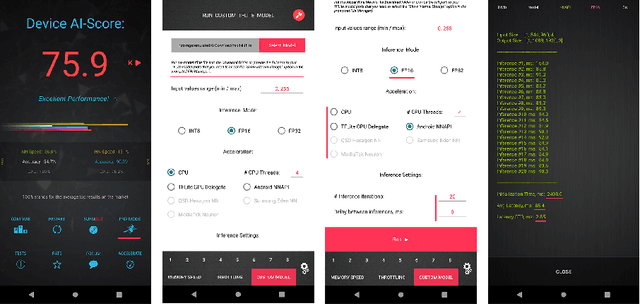
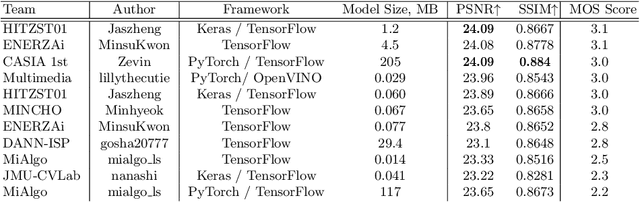
The role of mobile cameras increased dramatically over the past few years, leading to more and more research in automatic image quality enhancement and RAW photo processing. In this Mobile AI challenge, the target was to develop an efficient end-to-end AI-based image signal processing (ISP) pipeline replacing the standard mobile ISPs that can run on modern smartphone GPUs using TensorFlow Lite. The participants were provided with a large-scale Fujifilm UltraISP dataset consisting of thousands of paired photos captured with a normal mobile camera sensor and a professional 102MP medium-format FujiFilm GFX100 camera. The runtime of the resulting models was evaluated on the Snapdragon's 8 Gen 1 GPU that provides excellent acceleration results for the majority of common deep learning ops. The proposed solutions are compatible with all recent mobile GPUs, being able to process Full HD photos in less than 20-50 milliseconds while achieving high fidelity results. A detailed description of all models developed in this challenge is provided in this paper.
Frequent Itemset-driven Search for Finding Minimum Node Separators in Complex Networks
Jan 18, 2022



Finding an optimal set of critical nodes in a complex network has been a long-standing problem in the fields of both artificial intelligence and operations research. Potential applications include epidemic control, network security, carbon emission monitoring, emergence response, drug design, and vulnerability assessment. In this work, we consider the problem of finding a minimal node separator whose removal separates a graph into multiple different connected components with fewer than a limited number of vertices in each component. To solve it, we propose a frequent itemset-driven search approach, which integrates the concept of frequent itemset mining in data mining into the well-known memetic search framework. Starting from a high-quality population built by the solution construction and population repair procedures, it iteratively employs the frequent itemset recombination operator (to generate promising offspring solution based on itemsets that frequently occur in high-quality solutions), tabu search-based simulated annealing (to find high-quality local optima), population repair procedure (to modify the population), and rank-based population management strategy (to guarantee a healthy population). Extensive evaluations on 50 widely used benchmark instances show that it significantly outperforms state-of-the-art algorithms. In particular, it discovers 29 new upper bounds and matches 18 previous best-known bounds. Finally, experimental analyses are performed to confirm the effectiveness of key algorithmic modules of the proposed method.