 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconstructing Hand-Held Objects from Monocular Video
Nov 30, 2022
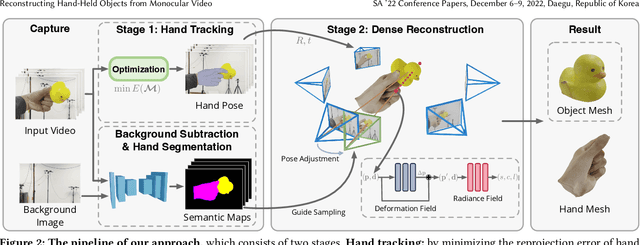
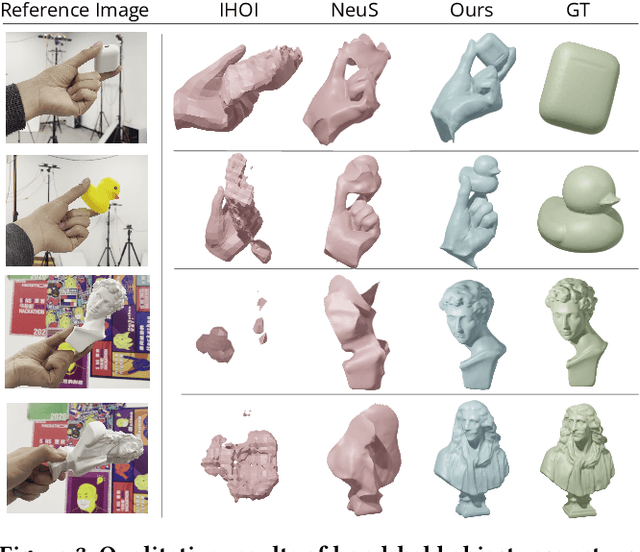
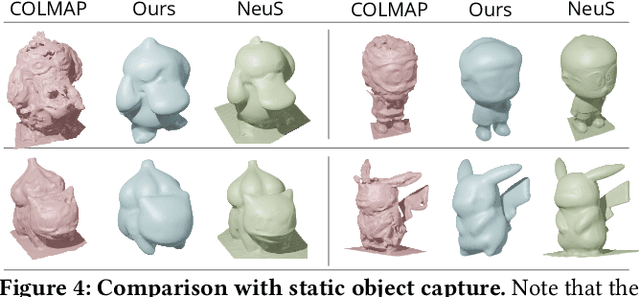
This paper presents an approach that reconstructs a hand-held object from a monocular video. In contrast to many recent methods that directly predict object geometry by a trained network, the proposed approach does not require any learned prior about the object and is able to recover more accurate and detailed object geometry. The key idea is that the hand motion naturally provides multiple views of the object and the motion can be reliably estimated by a hand pose tracker. Then, the object geometry can be recovered by solving a multi-view reconstruction problem. We devise an implicit neural representation-based method to solve the reconstruction problem and address the issues of imprecise hand pose estimation, relative hand-object motion, and insufficient geometry optimization for small objects. We also provide a newly collected dataset with 3D ground truth to validate the proposed approach.
GSC Loss: A Gaussian Score Calibrating Loss for Deep Learning
Mar 02, 2022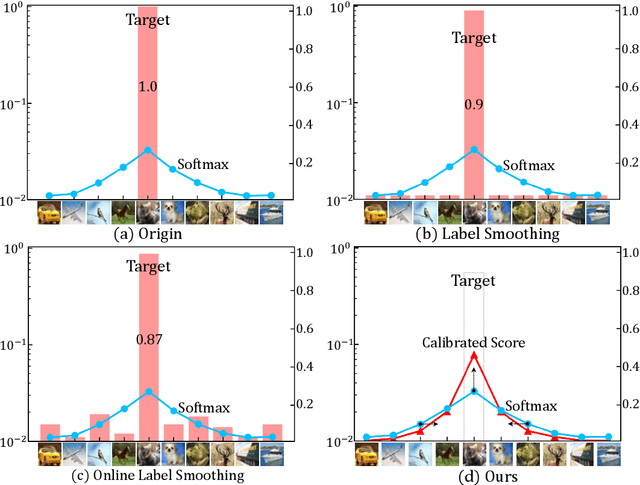
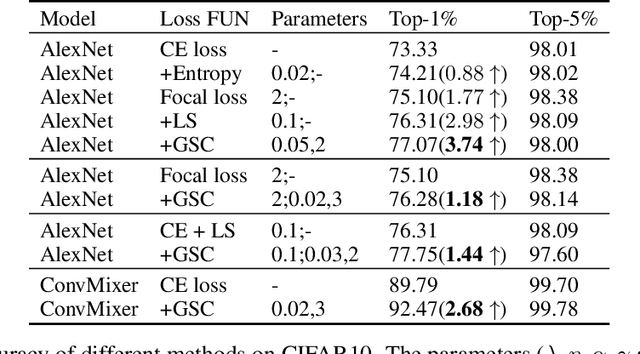
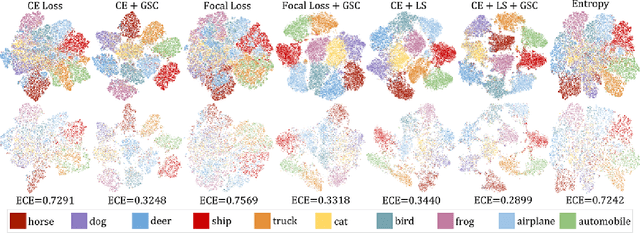
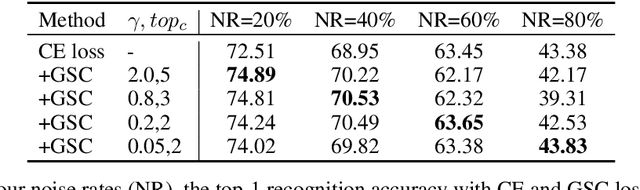
Cross entropy (CE) loss integrated with softmax is an orthodox component in most classification-based frameworks, but it fails to obtain an accurate probability distribution of predicted scores that is critical for further decision-making of poor-classified samples. The prediction score calibration provides a solution to learn the distribution of predicted scores which can explicitly make the model obtain a discriminative representation. Considering the entropy function can be utilized to measure the uncertainty of predicted scores. But, the gradient variation of it is not in line with the expectations of model optimization. To this end, we proposed a general Gaussian Score Calibrating (GSC) loss to calibrate the predicted scores produced by the deep neural networks (DNN). Extensive experiments on over 10 benchmark datasets demonstrate that the proposed GSC loss can yield consistent and significant performance boosts in a variety of visual tasks. Notably, our label-independent GSC loss can be embedded into common improved methods based on the CE loss easily.