 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRE-MCDF: Closed-Loop Multi-Expert LLM Reasoning for Knowledge-Grounded Clinical Diagnosis
Feb 01, 2026Electronic medical records (EMRs), particularly in neurology, are inherently heterogeneous, sparse, and noisy, which poses significant challenges for large language models (LLMs) in clinical diagnosis. In such settings, single-agent systems are vulnerable to self-reinforcing errors, as their predictions lack independent validation and can drift toward spurious conclusions. Although recent multi-agent frameworks attempt to mitigate this issue through collaborative reasoning, their interactions are often shallow and loosely structured, failing to reflect the rigorous, evidence-driven processes used by clinical experts. More fundamentally, existing approaches largely ignore the rich logical dependencies among diseases, such as mutual exclusivity, pathological compatibility, and diagnostic confusion. This limitation prevents them from ruling out clinically implausible hypotheses, even when sufficient evidence is available. To overcome these, we propose RE-MCDF, a relation-enhanced multi-expert clinical diagnosis framework. RE-MCDF introduces a generation--verification--revision closed-loop architecture that integrates three complementary components: (i) a primary expert that generates candidate diagnoses and supporting evidence, (ii) a laboratory expert that dynamically prioritizes heterogeneous clinical indicators, and (iii) a multi-relation awareness and evaluation expert group that explicitly enforces inter-disease logical constraints. Guided by a medical knowledge graph (MKG), the first two experts adaptively reweight EMR evidence, while the expert group validates and corrects candidate diagnoses to ensure logical consistency. Extensive experiments on the neurology subset of CMEMR (NEEMRs) and on our curated dataset (XMEMRs) demonstrate that RE-MCDF consistently outperforms state-of-the-art baselines in complex diagnostic scenarios.
ELSA: Efficient LLM-Centric Split Aggregation for Privacy-Aware Hierarchical Federated Learning over Resource-Constrained Edge Networks
Jan 20, 2026Training large language models (LLMs) at the network edge faces fundamental challenges arising from device resource constraints, severe data heterogeneity, and heightened privacy risks. To address these, we propose ELSA (Efficient LLM-centric Split Aggregation), a novel framework that systematically integrates split learning (SL) and hierarchical federated learning (HFL) for distributed LLM fine-tuning over resource-constrained edge networks. ELSA introduces three key innovations. First, it employs a task-agnostic, behavior-aware client clustering mechanism that constructs semantic fingerprints using public probe inputs and symmetric KL divergence, further enhanced by prediction-consistency-based trust scoring and latency-aware edge assignment to jointly address data heterogeneity, client unreliability, and communication constraints. Second, it splits the LLM into three parts across clients and edge servers, with the cloud used only for adapter aggregation, enabling an effective balance between on-device computation cost and global convergence stability. Third, it incorporates a lightweight communication scheme based on computational sketches combined with semantic subspace orthogonal perturbation (SS-OP) to reduce communication overhead while mitigating privacy leakage during model exchanges. Experiments across diverse NLP tasks demonstrate that ELSA consistently outperforms state-of-the-art methods in terms of adaptability, convergence behavior, and robustness, establishing a scalable and privacy-aware solution for edge-side LLM fine-tuning under resource constraints.
Adaptive UAV-Assisted Hierarchical Federated Learning: Optimizing Energy, Latency, and Resilience for Dynamic Smart IoT Networks
Mar 08, 2025



Hierarchical Federated Learning (HFL) introduces intermediate aggregation layers, addressing the limitations of conventional Federated Learning (FL) in geographically dispersed environments with limited communication infrastructure. An application of HFL is in smart IoT systems, such as remote monitoring, disaster response, and battlefield operations, where cellular connectivity is often unreliable or unavailable. In these scenarios, UAVs serve as mobile aggregators, providing connectivity to the terrestrial IoT devices. This paper studies an HFL architecture for energy-constrained UAVs in smart IoT systems, pioneering a solution to minimize global training cost increased caused by UAV disconnection. In light of this, we formulate a joint optimization problem involving learning configuration, bandwidth allocation, and device-to-UAV association, and perform global aggregation in time before UAV drops disconnect and redeployment of UAVs. The problem explicitly accounts for the dynamic nature of IoT devices and their interruptible communications and is unveiled to be NP-hard. To address this, we decompose it into three subproblems. First, we optimize the learning configuration and bandwidth allocation using an augmented Lagrangian function to reduce training costs. Second, we propose a device fitness score, integrating data heterogeneity (via Kullback-Leibler divergence), device-to-UAV distances, and IoT device resources, and develop a twin-delayed deep deterministic policy gradient (TD3)-based algorithm for dynamic device-to-UAV assignment. Third, We introduce a low-complexity two-stage greedy strategy for finding the location of UAVs redeployment and selecting the appropriate global aggregator UAV. Experiments on real-world datasets demonstrate significant cost reductions and robust performance under communication interruptions.
HEART: Achieving Timely Multi-Model Training for Vehicle-Edge-Cloud-Integrated Hierarchical Federated Learning
Jan 17, 2025



The rapid growth of AI-enabled Internet of Vehicles (IoV) calls for efficient machine learning (ML) solutions that can handle high vehicular mobility and decentralized data. This has motivated the emergence of Hierarchical Federated Learning over vehicle-edge-cloud architectures (VEC-HFL). Nevertheless, one aspect which is underexplored in the literature on VEC-HFL is that vehicles often need to execute multiple ML tasks simultaneously, where this multi-model training environment introduces crucial challenges. First, improper aggregation rules can lead to model obsolescence and prolonged training times. Second, vehicular mobility may result in inefficient data utilization by preventing the vehicles from returning their models to the network edge. Third, achieving a balanced resource allocation across diverse tasks becomes of paramount importance as it majorly affects the effectiveness of collaborative training. We take one of the first steps towards addressing these challenges via proposing a framework for multi-model training in dynamic VEC-HFL with the goal of minimizing global training latency while ensuring balanced training across various tasks-a problem that turns out to be NP-hard. To facilitate timely model training, we introduce a hybrid synchronous-asynchronous aggregation rule. Building on this, we present a novel method called Hybrid Evolutionary And gReedy allocaTion (HEART). The framework operates in two stages: first, it achieves balanced task scheduling through a hybrid heuristic approach that combines improved Particle Swarm Optimization (PSO) and Genetic Algorithms (GA); second, it employs a low-complexity greedy algorithm to determine the training priority of assigned tasks on vehicles. Experiments on real-world datasets demonstrate the superiority of HEART over existing methods.
Image tag completion by local learning
Aug 18, 2015
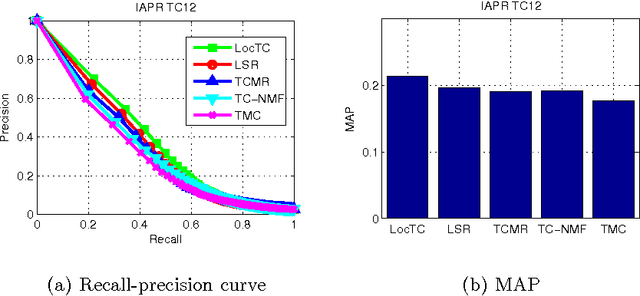
The problem of tag completion is to learn the missing tags of an image. In this paper, we propose to learn a tag scoring vector for each image by local linear learning. A local linear function is used in the neighborhood of each image to predict the tag scoring vectors of its neighboring images. We construct a unified objective function for the learning of both tag scoring vectors and local linear function parame- ters. In the objective, we impose the learned tag scoring vectors to be consistent with the known associations to the tags of each image, and also minimize the prediction error of each local linear function, while reducing the complexity of each local function. The objective function is optimized by an alternate optimization strategy and gradient descent methods in an iterative algorithm. We compare the proposed algorithm against different state-of-the-art tag completion methods, and the results show its advantages.