 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBioRAG: A RAG-LLM Framework for Biological Question Reasoning
Aug 02, 2024



The question-answering system for Life science research, which is characterized by the rapid pace of discovery, evolving insights, and complex interactions among knowledge entities, presents unique challenges in maintaining a comprehensive knowledge warehouse and accurate information retrieval. To address these issues, we introduce BioRAG, a novel Retrieval-Augmented Generation (RAG) with the Large Language Models (LLMs) framework. Our approach starts with parsing, indexing, and segmenting an extensive collection of 22 million scientific papers as the basic knowledge, followed by training a specialized embedding model tailored to this domain. Additionally, we enhance the vector retrieval process by incorporating a domain-specific knowledge hierarchy, which aids in modeling the intricate interrelationships among each query and context. For queries requiring the most current information, BioRAG deconstructs the question and employs an iterative retrieval process incorporated with the search engine for step-by-step reasoning. Rigorous experiments have demonstrated that our model outperforms fine-tuned LLM, LLM with search engines, and other scientific RAG frameworks across multiple life science question-answering tasks.
A Local Machine Learning Approach for Fingerprint-based Indoor Localization
Feb 21, 2023



Machine learning (ML) solutions to indoor localization problems have become popular in recent years due to high positioning accuracy and low cost of implementation. This paper proposes a novel local nonparametric approach for solving localizations from high-dimensional Received Signal Strength Indicator (RSSI) values. Our approach consists of a sequence of classification algorithms that sequentially narrows down the possible space for location solutions into smaller neighborhoods. The idea of this sequential classification method is similar to the decision tree algorithm, but a key difference is our splitting of the dataset at each node is not based on features of input (i.e. RSSI values), but some discrete-valued variables generated from the output variable (i.e. the 3D real-world coordinates). The strength of our localization solution can be tuned to problem specifics by the appropriate choice of how to sequentially partition the the space of location into smaller neighborhoods. Using the publicly available indoor localization dataset UJIIndoorLoc, we evaluate our proposed method vs. the global ML algorithms for the dataset. The primary contribution of this paper is to introduce a novel local ML solution for indoor localization problems.
On the Performance Gain of Integrated Sensing and Communications: A Subspace Correlation Perspective
Nov 02, 2022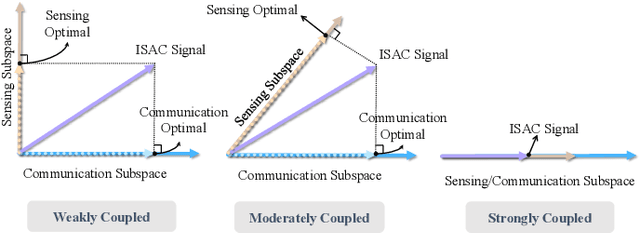
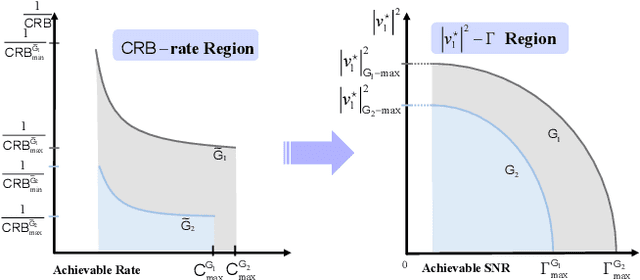
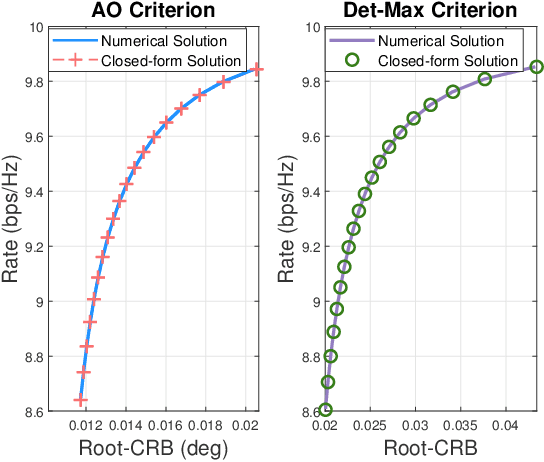
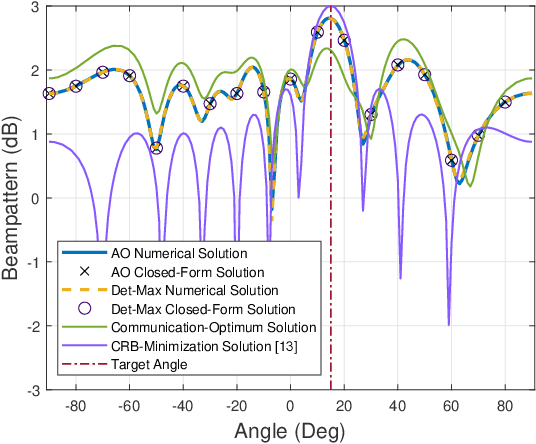
In this paper, we shed light on the performance gain of integrated sensing and communications (ISAC) from the perspective of channel correlations between radar sensing and communication (S&C), namely ISAC subspace correlation. To begin with, we consider a multi-input multi-output (MIMO) ISAC system and reveal that the optimal ISAC signal is in the subspace spanned by the transmitted steering vectors of the sensing channel and the right singular matrix of the communication channel. By leveraging this result, we study a basic ISAC scenario with a single target and a single-antenna communication user, and derive the optimal waveform covariance matrix for minimizing the estimation error under a given communication rate constraint. To quantify the integration gain of ISAC systems, we define the subspace "correlation coefficient" to characterize the coupling effect between S&C channels. Finally, numerical results are provided to validate the effectiveness of the proposed approaches.
RIS-assisted Integrated Sensing and Communications: A Subspace Rotation Approach
Oct 23, 2022



In this paper, we propose a novel joint active and passive beamforming approach for integrated sensing and communication (ISAC) transmission with assistance of reconfigurable intelligent surfaces (RISs) to simultaneously detect a target and communicate with a communication user. We first show that the sensing and communication (S&C) performance can be jointly improved due to the capability of the RISs to control the ISAC channel. In particular, we show that RISs can favourably enhance both the channel gain and the coupling degree of S&C channels by modifying the underlying subspaces. In light of this, we develop a heuristic algorithm that expands and rotates the S&C subspaces that is able to attain significantly improved ISAC performance. To verify the effectiveness of the subspace rotation scheme, we further provide a benchmark scheme which maximizes the signal-to-noise ratio (SNR) at the sensing receiver while guaranteeing the SNR at the communication user. Finally, numerical simulations are provided to validate the proposed approaches.
Vehicular Connectivity on Complex Trajectories: Roadway-Geometry Aware ISAC Beam-tracking
May 24, 2022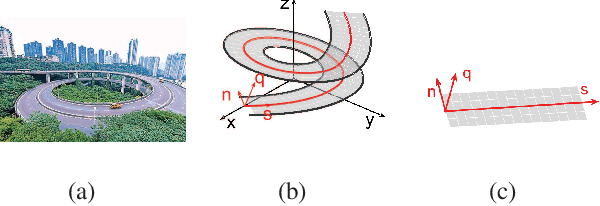
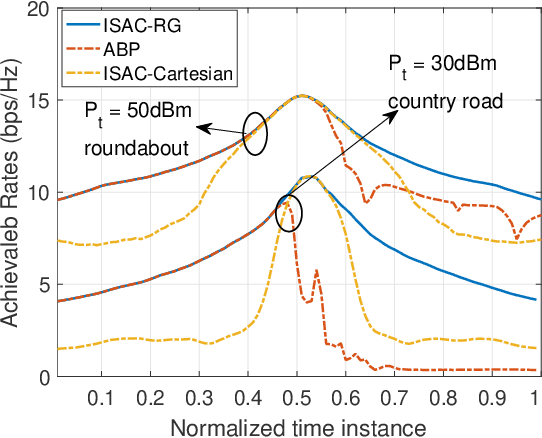
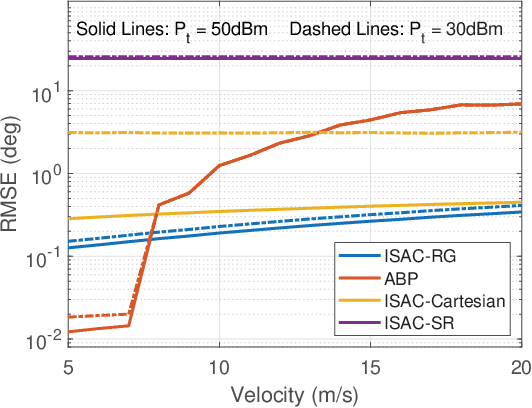

In this paper, we propose sensing-assisted beamforming designs for vehicles on arbitrarily shaped roads by relying on integrated sensing and communication (ISAC) signalling.Specifically, we aim to address the limitations of conventional ISAC beam-tracking schemes that do not apply to complex road geometries. To improve the tracking accuracy and communication quality of service (QoS) in vehicle to infrastructure (V2I) networks, it is essential to model the complicated roadway geometry. To that end, we impose the curvilinear coordinate system (CCS) in an interacting multiple model extended Kalman filter (IMM-EKF) framework. By doing so, both the position and the motion of the vehicle on a complicated road can be explicitly modeled and precisely tracked attributing to the benefits from the CCS. Furthermore, an optimization problem is formulated to maximize the array gain through dynamically adjusting the array size and thereby controlling the beamwidth, which takes the performance loss caused by beam misalignment into account.Numerical simulations demonstrate that the roadway geometry-aware ISAC beamforming approach outperforms the communication-only based and ISAC kinematic-only based technique in the tracking performance. Moreover, the effectiveness of the dynamic beamwidth design is also verified by our numerical results.