 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Open-ended Embodied Tasks Solving
Dec 10, 2023



Empowering embodied agents, such as robots, with Artificial Intelligence (AI) has become increasingly important in recent years. A major challenge is task open-endedness. In practice, robots often need to perform tasks with novel goals that are multifaceted, dynamic, lack a definitive "end-state", and were not encountered during training. To tackle this problem, this paper introduces \textit{Diffusion for Open-ended Goals} (DOG), a novel framework designed to enable embodied AI to plan and act flexibly and dynamically for open-ended task goals. DOG synergizes the generative prowess of diffusion models with state-of-the-art, training-free guidance techniques to adaptively perform online planning and control. Our evaluations demonstrate that DOG can handle various kinds of novel task goals not seen during training, in both maze navigation and robot control problems. Our work sheds light on enhancing embodied AI's adaptability and competency in tackling open-ended goals.
Evolving Domain Generalization
Jun 07, 2022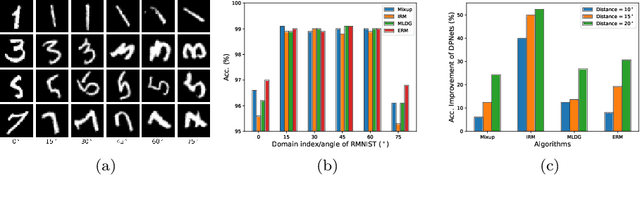
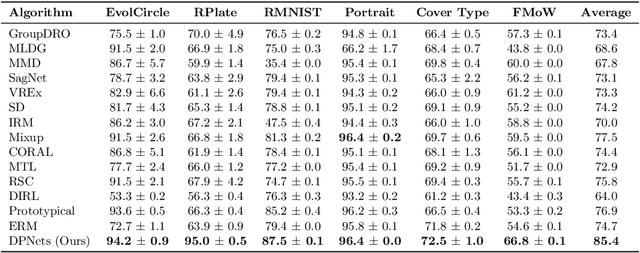


Domain generalization aims to learn a predictive model from multiple different but related source tasks that can generalize well to a target task without the need of accessing any target data. Existing domain generalization methods ignore the relationship between tasks, implicitly assuming that all the tasks are sampled from a stationary environment. Therefore, they can fail when deployed in an evolving environment. To this end, we formulate and study the \emph{evolving domain generalization} (EDG) scenario, which exploits not only the source data but also their evolving pattern to generate a model for the unseen task. Our theoretical result reveals the benefits of modeling the relation between two consecutive tasks by learning a globally consistent directional mapping function. In practice, our analysis also suggests solving the DDG problem in a meta-learning manner, which leads to \emph{directional prototypical network}, the first method for the DDG problem. Empirical evaluation of both synthetic and real-world data sets validates the effectiveness of our approach.