 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelective KV-Cache Sharing to Mitigate Timing Side-Channels in LLM Inference
Aug 11, 2025Global KV-cache sharing has emerged as a key optimization for accelerating large language model (LLM) inference. However, it exposes a new class of timing side-channel attacks, enabling adversaries to infer sensitive user inputs via shared cache entries. Existing defenses, such as per-user isolation, eliminate leakage but degrade performance by up to 38.9% in time-to-first-token (TTFT), making them impractical for high-throughput deployment. To address this gap, we introduce SafeKV (Secure and Flexible KV Cache Sharing), a privacy-aware KV-cache management framework that selectively shares non-sensitive entries while confining sensitive content to private caches. SafeKV comprises three components: (i) a hybrid, multi-tier detection pipeline that integrates rule-based pattern matching, a general-purpose privacy detector, and context-aware validation; (ii) a unified radix-tree index that manages public and private entries across heterogeneous memory tiers (HBM, DRAM, SSD); and (iii) entropy-based access monitoring to detect and mitigate residual information leakage. Our evaluation shows that SafeKV mitigates 94% - 97% of timing-based side-channel attacks. Compared to per-user isolation method, SafeKV improves TTFT by up to 40.58% and throughput by up to 2.66X across diverse LLMs and workloads. SafeKV reduces cache-induced TTFT overhead from 50.41% to 11.74% on Qwen3-235B. By combining fine-grained privacy control with high cache reuse efficiency, SafeKV reclaims the performance advantages of global sharing while providing robust runtime privacy guarantees for LLM inference.
Accelerating Distributed Deep Learning using Lossless Homomorphic Compression
Feb 12, 2024



As deep neural networks (DNNs) grow in complexity and size, the resultant increase in communication overhead during distributed training has become a significant bottleneck, challenging the scalability of distributed training systems. Existing solutions, while aiming to mitigate this bottleneck through worker-level compression and in-network aggregation, fall short due to their inability to efficiently reconcile the trade-offs between compression effectiveness and computational overhead, hindering overall performance and scalability. In this paper, we introduce a novel compression algorithm that effectively merges worker-level compression with in-network aggregation. Our solution is both homomorphic, allowing for efficient in-network aggregation without CPU/GPU processing, and lossless, ensuring no compromise on training accuracy. Theoretically optimal in compression and computational efficiency, our approach is empirically validated across diverse DNN models such as NCF, LSTM, VGG19, and BERT-base, showing up to a 6.33$\times$ improvement in aggregation throughput and a 3.74$\times$ increase in per-iteration training speed.
Efficient Data-Plane Memory Scheduling for In-Network Aggregation
Jan 17, 2022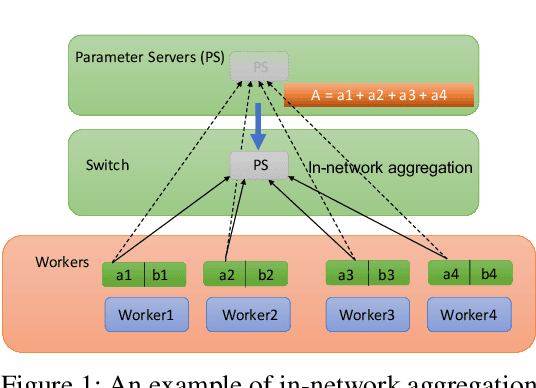
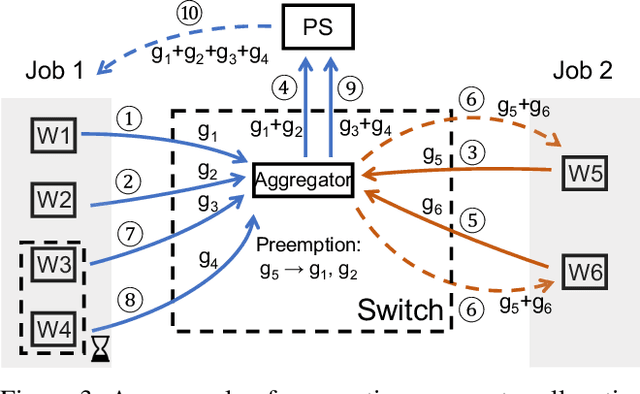
As the scale of distributed training grows, communication becomes a bottleneck. To accelerate the communication, recent works introduce In-Network Aggregation (INA), which moves the gradients summation into network middle-boxes, e.g., programmable switches to reduce the traffic volume. However, switch memory is scarce compared to the volume of gradients transmitted in distributed training. Although literature applies methods like pool-based streaming or dynamic sharing to tackle the mismatch, switch memory is still a potential performance bottleneck. Furthermore, we observe the under-utilization of switch memory due to the synchronization requirement for aggregator deallocation in recent works. To improve the switch memory utilization, we propose ESA, an $\underline{E}$fficient Switch Memory $\underline{S}$cheduler for In-Network $\underline{A}$ggregation. At its cores, ESA enforces the preemptive aggregator allocation primitive and introduces priority scheduling at the data-plane, which improves the switch memory utilization and average job completion time (JCT). Experiments show that ESA can improve the average JCT by up to $1.35\times$.
Simultaneously Achieving Sublinear Regret and Constraint Violations for Online Convex Optimization with Time-varying Constraints
Nov 15, 2021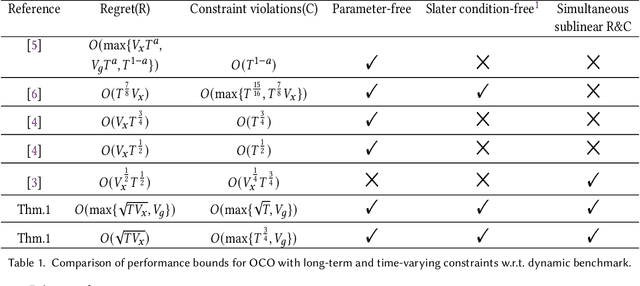
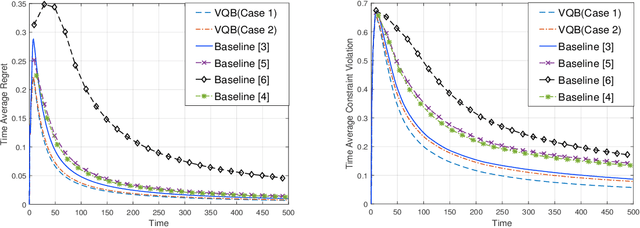
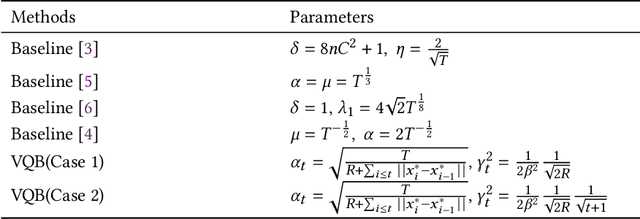
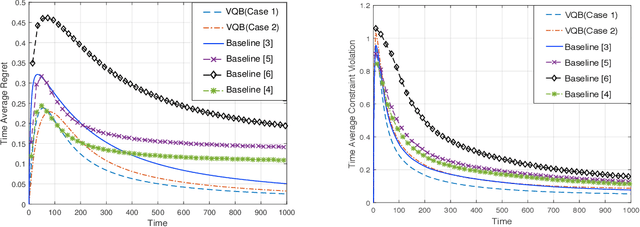
In this paper, we develop a novel virtual-queue-based online algorithm for online convex optimization (OCO) problems with long-term and time-varying constraints and conduct a performance analysis with respect to the dynamic regret and constraint violations. We design a new update rule of dual variables and a new way of incorporating time-varying constraint functions into the dual variables. To the best of our knowledge, our algorithm is the first parameter-free algorithm to simultaneously achieve sublinear dynamic regret and constraint violations. Our proposed algorithm also outperforms the state-of-the-art results in many aspects, e.g., our algorithm does not require the Slater condition. Meanwhile, for a group of practical and widely-studied constrained OCO problems in which the variation of consecutive constraints is smooth enough across time, our algorithm achieves $O(1)$ constraint violations. Furthermore, we extend our algorithm and analysis to the case when the time horizon $T$ is unknown. Finally, numerical experiments are conducted to validate the theoretical guarantees of our algorithm, and some applications of our proposed framework will be outlined.
* 31 pages, it has been accepted at Performance 2021
Indoor Positioning System based on Visible Light Communication for Mobile Robot in Nuclear Power Plant
Nov 16, 2020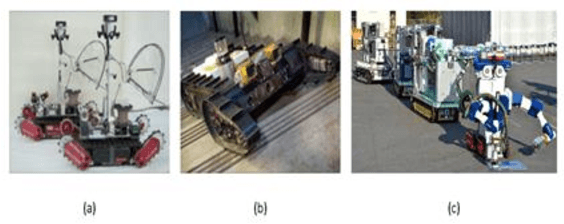
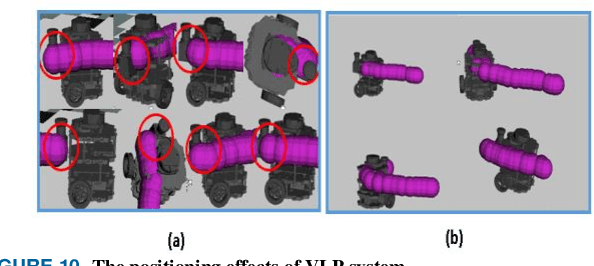

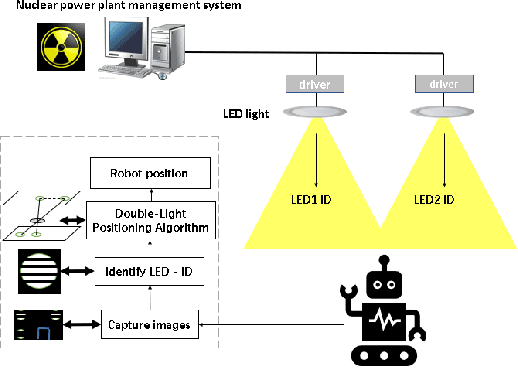
Visible light positioning (VLP) is widely believed to be a cost-effective answer to the growing demanded for robot indoor positioning. Considering that some extreme environments require robot to be equipped with a precise and radiation-resistance indoor positioning system for doing difficult work, a novel VLP system with high accuracy is proposed to realize the long-playing inspection and intervention under radiation environment. The proposed system with sufficient radiation-tolerance is critical for operational inspection, maintenance and intervention tasks in nuclear facilities. Firstly, we designed intelligent LED lamp with visible light communication (VLC) function to dynamically create the indoor GPS tracking system. By installing the proposed lamps that replace standard lighting in key locations in the nuclear power plant, the proposed system can strengthen the safety of mobile robot and help for efficient inspection in the large-scale field. Secondly, in order to enhance the radiation-tolerance and multi-scenario of the proposed system, we proposed a shielding protection method for the camera vertically installed on the robot, which ensures that the image elements of the camera namely the captured VLP information is not affected by radiation. Besides, with the optimized visible light positioning algorithm based on dispersion calibration method, the proposed VLP system can achieve an average positioning accuracy of 0.82cm and ensure that 90% positioning errors are less than 1.417cm. Therefore, the proposed system not only has sufficient radiation-tolerance but achieve state-of-the-art positioning accuracy in the visible light positioning field.