 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVulcan: Instance-Optimal Systems Heuristics Through LLM-Driven Search
Dec 31, 2025Resource-management tasks in modern operating and distributed systems continue to rely primarily on hand-designed heuristics for tasks such as scheduling, caching, or active queue management. Designing performant heuristics is an expensive, time-consuming process that we are forced to continuously go through due to the constant flux of hardware, workloads and environments. We propose a new alternative: synthesizing instance-optimal heuristics -- specialized for the exact workloads and hardware where they will be deployed -- using code-generating large language models (LLMs). To make this synthesis tractable, Vulcan separates policy and mechanism through LLM-friendly, task-agnostic interfaces. With these interfaces, users specify the inputs and objectives of their desired policy, while Vulcan searches for performant policies via evolutionary search over LLM-generated code. This interface is expressive enough to capture a wide range of system policies, yet sufficiently constrained to allow even small, inexpensive LLMs to generate correct and executable code. We use Vulcan to synthesize performant heuristics for cache eviction and memory tiering, and find that these heuristics outperform all human-designed state-of-the-art algorithms by upto 69% and 7.9% in performance for each of these tasks respectively.
ConfigBot: Adaptive Resource Allocation for Robot Applications in Dynamic Environments
Jan 17, 2025



The growing use of autonomous mobile service robots (AMSRs) in dynamic environments requires flexible management of compute resources to optimize the performance of diverse tasks such as navigation, localization, perception, and so on. Current robot deployments, which oftentimes rely on static configurations (of the OS, applications, etc.) and system over-provisioning, fall short since they do not account for the tasks' performance variations resulting in poor system-wide behavior such as robot instability and/or inefficient resource use. This paper presents ConfigBot, a system designed to adaptively reconfigure AMSR applications to meet a predefined performance specification by leveraging runtime profiling and automated configuration tuning. Through experiments on a Boston Dynamics Spot robot equipped with NVIDIA AGX Orin, we demonstrate ConfigBot's efficacy in maintaining system stability and optimizing resource allocation across diverse scenarios. Our findings highlight the promise of tailored and dynamic configurations for robot deployments.
C3: Learning Congestion Controllers with Formal Certificates
Dec 14, 2024



Learning-based congestion controllers offer better adaptability compared to traditional heuristic algorithms. However, the inherent unreliability of learning techniques can cause learning-based controllers to behave poorly, creating a need for formal guarantees. While methods for formally verifying learned congestion controllers exist, these methods offer binary feedback that cannot optimize the controller toward better behavior. We improve this state-of-the-art via C3, a new learning framework for congestion control that integrates the concept of formal certification in the learning loop. C3 uses an abstract interpreter that can produce robustness and performance certificates to guide the training process, rewarding models that are robust and performant even on worst-case inputs. Our evaluation demonstrates that unlike state-of-the-art learned controllers, C3-trained controllers provide both adaptability and worst-case reliability across a range of network conditions.
Accelerating Distributed Deep Learning using Lossless Homomorphic Compression
Feb 12, 2024



As deep neural networks (DNNs) grow in complexity and size, the resultant increase in communication overhead during distributed training has become a significant bottleneck, challenging the scalability of distributed training systems. Existing solutions, while aiming to mitigate this bottleneck through worker-level compression and in-network aggregation, fall short due to their inability to efficiently reconcile the trade-offs between compression effectiveness and computational overhead, hindering overall performance and scalability. In this paper, we introduce a novel compression algorithm that effectively merges worker-level compression with in-network aggregation. Our solution is both homomorphic, allowing for efficient in-network aggregation without CPU/GPU processing, and lossless, ensuring no compromise on training accuracy. Theoretically optimal in compression and computational efficiency, our approach is empirically validated across diverse DNN models such as NCF, LSTM, VGG19, and BERT-base, showing up to a 6.33$\times$ improvement in aggregation throughput and a 3.74$\times$ increase in per-iteration training speed.
On a Foundation Model for Operating Systems
Dec 13, 2023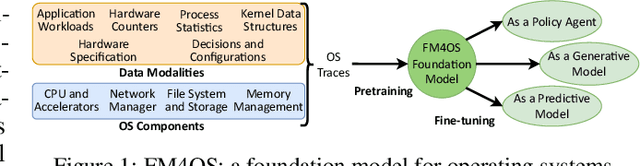
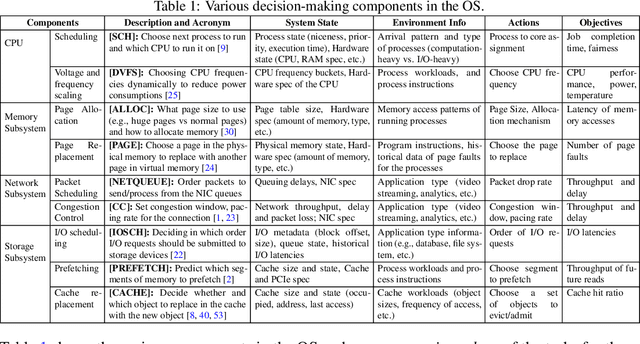
This paper lays down the research agenda for a domain-specific foundation model for operating systems (OSes). Our case for a foundation model revolves around the observations that several OS components such as CPU, memory, and network subsystems are interrelated and that OS traces offer the ideal dataset for a foundation model to grasp the intricacies of diverse OS components and their behavior in varying environments and workloads. We discuss a wide range of possibilities that then arise, from employing foundation models as policy agents to utilizing them as generators and predictors to assist traditional OS control algorithms. Our hope is that this paper spurs further research into OS foundation models and creating the next generation of operating systems for the evolving computing landscape.