 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnified End-to-End V2X Cooperative Autonomous Driving
May 07, 2024

V2X cooperation, through the integration of sensor data from both vehicles and infrastructure, is considered a pivotal approach to advancing autonomous driving technology. Current research primarily focuses on enhancing perception accuracy, often overlooking the systematic improvement of accident prediction accuracy through end-to-end learning, leading to insufficient attention to the safety issues of autonomous driving. To address this challenge, this paper introduces the UniE2EV2X framework, a V2X-integrated end-to-end autonomous driving system that consolidates key driving modules within a unified network. The framework employs a deformable attention-based data fusion strategy, effectively facilitating cooperation between vehicles and infrastructure. The main advantages include: 1) significantly enhancing agents' perception and motion prediction capabilities, thereby improving the accuracy of accident predictions; 2) ensuring high reliability in the data fusion process; 3) superior end-to-end perception compared to modular approaches. Furthermore, We implement the UniE2EV2X framework on the challenging DeepAccident, a simulation dataset designed for V2X cooperative driving.
Artistic Arbitrary Style Transfer
Dec 21, 2022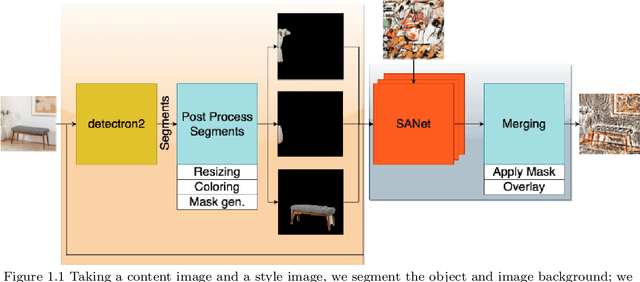
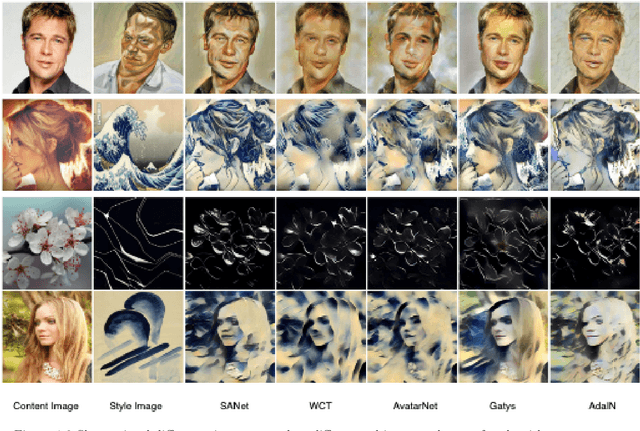
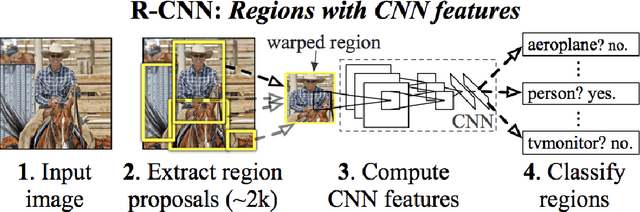
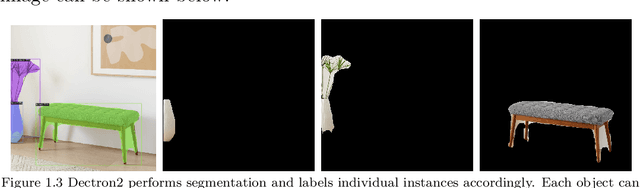
Arbitrary Style Transfer is a technique used to produce a new image from two images: a content image, and a style image. The newly produced image is unseen and is generated from the algorithm itself. Balancing the structure and style components has been the major challenge that other state-of-the-art algorithms have tried to solve. Despite all the efforts, it's still a major challenge to apply the artistic style that was originally created on top of the structure of the content image while maintaining consistency. In this work, we solved these problems by using a Deep Learning approach using Convolutional Neural Networks. Our implementation will first extract foreground from the background using the pre-trained Detectron 2 model from the content image, and then apply the Arbitrary Style Transfer technique that is used in SANet. Once we have the two styled images, we will stitch the two chunks of images after the process of style transfer for the complete end piece.
Improved Matrix Gaussian Mechanism for Differential Privacy
Apr 30, 2021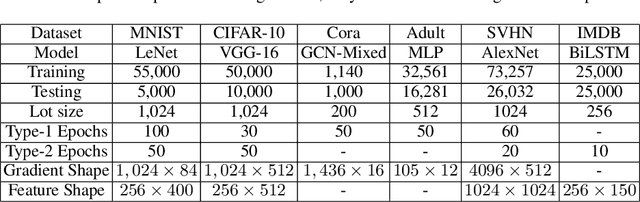
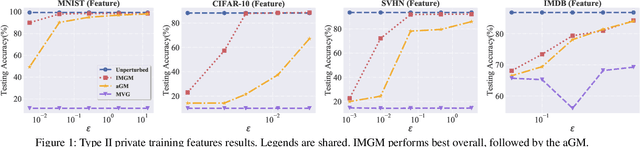
The wide deployment of machine learning in recent years gives rise to a great demand for large-scale and high-dimensional data, for which the privacy raises serious concern. Differential privacy (DP) mechanisms are conventionally developed for scalar values, not for structural data like matrices. Our work proposes Improved Matrix Gaussian Mechanism (IMGM) for matrix-valued DP, based on the necessary and sufficient condition of $ (\varepsilon,\delta) $-differential privacy. IMGM only imposes constraints on the singular values of the covariance matrices of the noise, which leaves room for design. Among the legitimate noise distributions for matrix-valued DP, we find the optimal one turns out to be i.i.d. Gaussian noise, and the DP constraint becomes a noise lower bound on each element. We further derive a tight composition method for IMGM. Apart from the theoretical analysis, experiments on a variety of models and datasets also verify that IMGM yields much higher utility than the state-of-the-art mechanisms at the same privacy guarantee.