 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Review to Design: Ethical Multimodal Driver Monitoring Systems for Risk Mitigation, Incident Response, and Accountability in Automated Vehicles
May 07, 2026As vehicles transition toward higher levels of automation, Driver Monitoring Systems (DMS) have become essential for ensuring human oversight, safety, and regulatory compliance in a vehicle. These systems rely on multimodal sensing and AI-driven inference to assess driver attention, cognitive state, and readiness to take control. While technologically promising, their deployment introduces a complex set of ethical and legal challenges - ranging from privacy and consent to data ownership and algorithmic fairness. While overarching frameworks such as the GDPR, EU AI Act, and IEEE standards offer important guidance, they lack the specificity required for addressing the unique risks posed by in-cabin sensing technologies. This paper adopts a review-to-design perspective, critically examining existing regulatory instruments and ethical frameworks -- such as the GDPR, the EU AI Act, and IEEE guidelines -- and identifying gaps in their applicability to the distinctive risks posed by multimodal, AI-enabled in-cabin monitoring. Building on this review, we propose a modular ethical design framework tailored specifically to Driver Monitoring Systems. The framework translates high-level principles into actionable design and deployment guidance, including user-configurable consent mechanisms, fairness-aware model development, transparency and explainability tools, and safeguards for driver emotional well-being. Finally, the paper outlines a risk analysis and failure mitigation strategy, emphasizing proactive incident response and accountability mechanisms tailored to the DMS context. Together, these contributions aim to inform the development of transparent, trustworthy, and human-centered driver monitoring systems for next-generation autonomous vehicles.
SynSacc: A Blender-to-V2E Pipeline for Synthetic Neuromorphic Eye-Movement Data and Sim-to-Real Spiking Model Training
Feb 09, 2026The study of eye movements, particularly saccades and fixations, are fundamental to understanding the mechanisms of human cognition and perception. Accurate classification of these movements requires sensing technologies capable of capturing rapid dynamics without distortion. Event cameras, also known as Dynamic Vision Sensors (DVS), provide asynchronous recordings of changes in light intensity, thereby eliminating motion blur inherent in conventional frame-based cameras and offering superior temporal resolution and data efficiency. In this study, we introduce a synthetic dataset generated with Blender to simulate saccades and fixations under controlled conditions. Leveraging Spiking Neural Networks (SNNs), we evaluate its robustness by training two architectures and finetuning on real event data. The proposed models achieve up to 0.83 accuracy and maintain consistent performance across varying temporal resolutions, demonstrating stability in eye movement classification. Moreover, the use of SNNs with synthetic event streams yields substantial computational efficiency gains over artificial neural network (ANN) counterparts, underscoring the utility of synthetic data augmentation in advancing event-based vision. All code and datasets associated with this work is available at https: //github.com/Ikhadija-5/SynSacc-Dataset.
Autobiasing Event Cameras
Nov 01, 2024



This paper presents an autonomous method to address challenges arising from severe lighting conditions in machine vision applications that use event cameras. To manage these conditions, the research explores the built in potential of these cameras to adjust pixel functionality, named bias settings. As cars are driven at various times and locations, shifts in lighting conditions are unavoidable. Consequently, this paper utilizes the neuromorphic YOLO-based face tracking module of a driver monitoring system as the event-based application to study. The proposed method uses numerical metrics to continuously monitor the performance of the event-based application in real-time. When the application malfunctions, the system detects this through a drop in the metrics and automatically adjusts the event cameras bias values. The Nelder-Mead simplex algorithm is employed to optimize this adjustment, with finetuning continuing until performance returns to a satisfactory level. The advantage of bias optimization lies in its ability to handle conditions such as flickering or darkness without requiring additional hardware or software. To demonstrate the capabilities of the proposed system, it was tested under conditions where detecting human faces with default bias values was impossible. These severe conditions were simulated using dim ambient light and various flickering frequencies. Following the automatic and dynamic process of bias modification, the metrics for face detection significantly improved under all conditions. Autobiasing resulted in an increase in the YOLO confidence indicators by more than 33 percent for object detection and 37 percent for face detection highlighting the effectiveness of the proposed method.
Evaluating Image-Based Face and Eye Tracking with Event Cameras
Aug 19, 2024

Event Cameras, also known as Neuromorphic sensors, capture changes in local light intensity at the pixel level, producing asynchronously generated data termed ``events''. This distinct data format mitigates common issues observed in conventional cameras, like under-sampling when capturing fast-moving objects, thereby preserving critical information that might otherwise be lost. However, leveraging this data often necessitates the development of specialized, handcrafted event representations that can integrate seamlessly with conventional Convolutional Neural Networks (CNNs), considering the unique attributes of event data. In this study, We evaluate event-based Face and Eye tracking. The core objective of our study is to showcase the viability of integrating conventional algorithms with event-based data, transformed into a frame format while preserving the unique benefits of event cameras. To validate our approach, we constructed a frame-based event dataset by simulating events between RGB frames derived from the publicly accessible Helen Dataset. We assess its utility for face and eye detection tasks through the application of GR-YOLO -- a pioneering technique derived from YOLOv3. This evaluation includes a comparative analysis with results derived from training the dataset with YOLOv8. Subsequently, the trained models were tested on real event streams from various iterations of Prophesee's event cameras and further evaluated on the Faces in Event Stream (FES) benchmark dataset. The models trained on our dataset shows a good prediction performance across all the datasets obtained for validation with the best results of a mean Average precision score of 0.91. Additionally, The models trained demonstrated robust performance on real event camera data under varying light conditions.
Event-Stream Super Resolution using Sigma-Delta Neural Network
Aug 13, 2024This study introduces a novel approach to enhance the spatial-temporal resolution of time-event pixels based on luminance changes captured by event cameras. These cameras present unique challenges due to their low resolution and the sparse, asynchronous nature of the data they collect. Current event super-resolution algorithms are not fully optimized for the distinct data structure produced by event cameras, resulting in inefficiencies in capturing the full dynamism and detail of visual scenes with improved computational complexity. To bridge this gap, our research proposes a method that integrates binary spikes with Sigma Delta Neural Networks (SDNNs), leveraging spatiotemporal constraint learning mechanism designed to simultaneously learn the spatial and temporal distributions of the event stream. The proposed network is evaluated using widely recognized benchmark datasets, including N-MNIST, CIFAR10-DVS, ASL-DVS, and Event-NFS. A comprehensive evaluation framework is employed, assessing both the accuracy, through root mean square error (RMSE), and the computational efficiency of our model. The findings demonstrate significant improvements over existing state-of-the-art methods, specifically, the proposed method outperforms state-of-the-art performance in computational efficiency, achieving a 17.04-fold improvement in event sparsity and a 32.28-fold increase in synaptic operation efficiency over traditional artificial neural networks, alongside a two-fold better performance over spiking neural networks.
Spiking-DD: Neuromorphic Event Camera based Driver Distraction Detection with Spiking Neural Network
Jul 30, 2024Event camera-based driver monitoring is emerging as a pivotal area of research, driven by its significant advantages such as rapid response, low latency, power efficiency, enhanced privacy, and prevention of undersampling. Effective detection of driver distraction is crucial in driver monitoring systems to enhance road safety and reduce accident rates. The integration of an optimized sensor such as Event Camera with an optimized network is essential for maximizing these benefits. This paper introduces the innovative concept of sensing without seeing to detect driver distraction, leveraging computationally efficient spiking neural networks (SNN). To the best of our knowledge, this study is the first to utilize event camera data with spiking neural networks for driver distraction. The proposed Spiking-DD network not only achieve state of the art performance but also exhibit fewer parameters and provides greater accuracy than current event-based methodologies.
A Framework for Pupil Tracking with Event Cameras
Jul 23, 2024Saccades are extremely rapid movements of both eyes that occur simultaneously, typically observed when an individual shifts their focus from one object to another. These movements are among the swiftest produced by humans and possess the potential to achieve velocities greater than that of blinks. The peak angular speed of the eye during a saccade can reach as high as 700{\deg}/s in humans, especially during larger saccades that cover a visual angle of 25{\deg}. Previous research has demonstrated encouraging outcomes in comprehending neurological conditions through the study of saccades. A necessary step in saccade detection involves accurately identifying the precise location of the pupil within the eye, from which additional information such as gaze angles can be inferred. Conventional frame-based cameras often struggle with the high temporal precision necessary for tracking very fast movements, resulting in motion blur and latency issues. Event cameras, on the other hand, offer a promising alternative by recording changes in the visual scene asynchronously and providing high temporal resolution and low latency. By bridging the gap between traditional computer vision and event-based vision, we present events as frames that can be readily utilized by standard deep learning algorithms. This approach harnesses YOLOv8, a state-of-the-art object detection technology, to process these frames for pupil tracking using the publicly accessible Ev-Eye dataset. Experimental results demonstrate the framework's effectiveness, highlighting its potential applications in neuroscience, ophthalmology, and human-computer interaction.
Heart Rate Detection Using an Event Camera
Sep 21, 2023



Event cameras, also known as neuromorphic cameras, are an emerging technology that offer advantages over traditional shutter and frame-based cameras, including high temporal resolution, low power consumption, and selective data acquisition. In this study, we propose to harnesses the capabilities of event-based cameras to capture subtle changes in the surface of the skin caused by the pulsatile flow of blood in the wrist region. We investigate whether an event camera could be used for continuous noninvasive monitoring of heart rate (HR). Event camera video data from 25 participants, comprising varying age groups and skin colours, was collected and analysed. Ground-truth HR measurements obtained using conventional methods were used to evaluate of the accuracy of automatic detection of HR from event camera data. Our experimental results and comparison to the performance of other non-contact HR measurement methods demonstrate the feasibility of using event cameras for pulse detection. We also acknowledge the challenges and limitations of our method, such as light-induced flickering and the sub-conscious but naturally-occurring tremors of an individual during data capture.
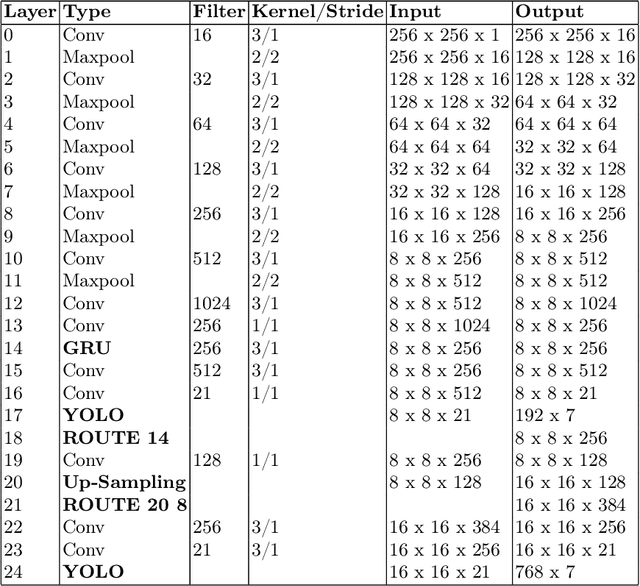
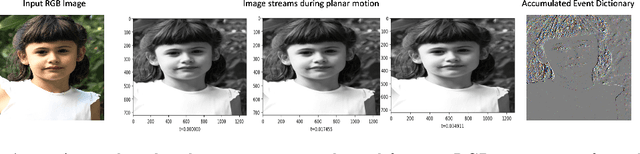
Neuromorphic Seatbelt State Detection for In-Cabin Monitoring with Event Cameras
Aug 15, 2023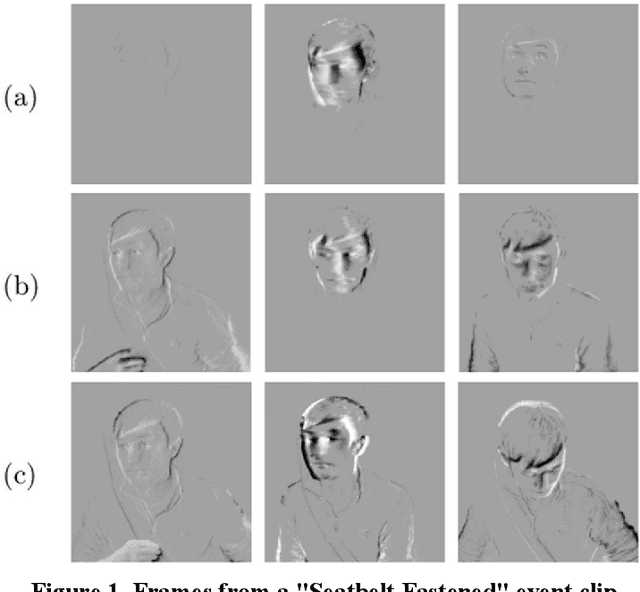
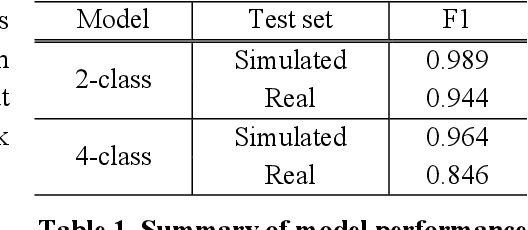
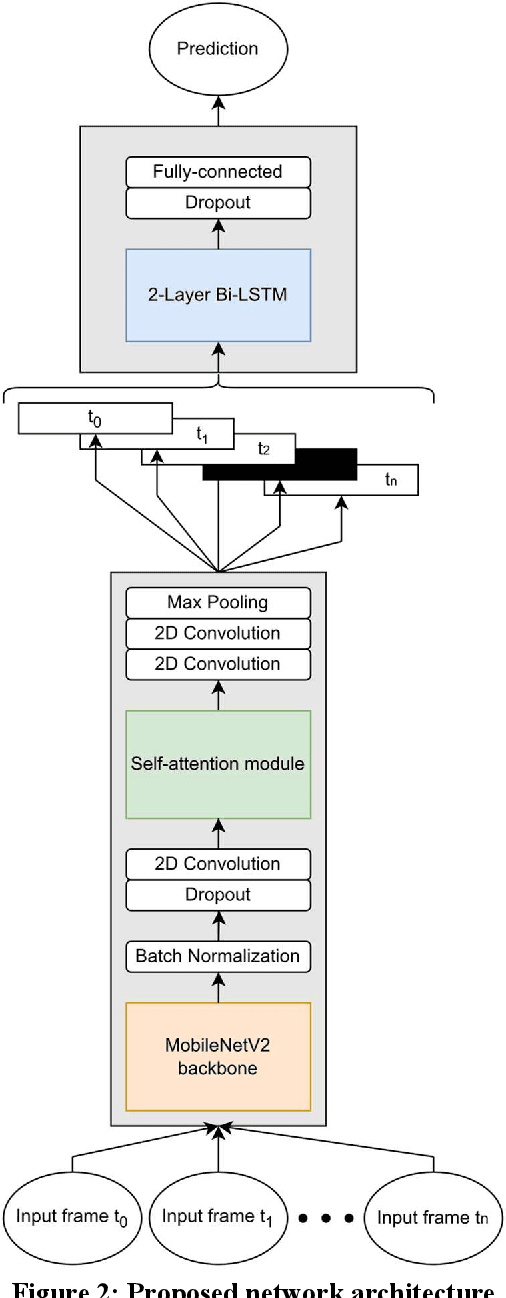
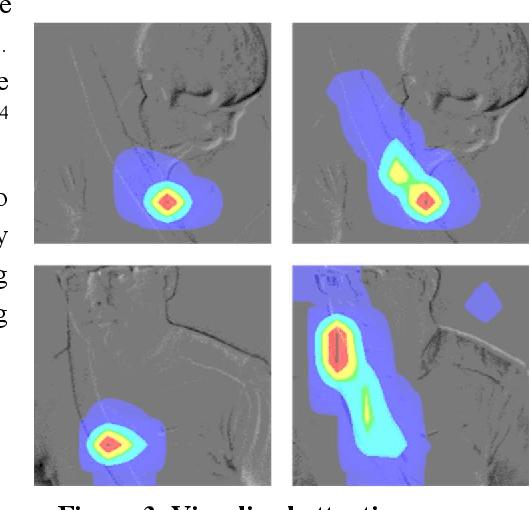
Neuromorphic vision sensors, or event cameras, differ from conventional cameras in that they do not capture images at a specified rate. Instead, they asynchronously log local brightness changes at each pixel. As a result, event cameras only record changes in a given scene, and do so with very high temporal resolution, high dynamic range, and low power requirements. Recent research has demonstrated how these characteristics make event cameras extremely practical sensors in driver monitoring systems (DMS), enabling the tracking of high-speed eye motion and blinks. This research provides a proof of concept to expand event-based DMS techniques to include seatbelt state detection. Using an event simulator, a dataset of 108,691 synthetic neuromorphic frames of car occupants was generated from a near-infrared (NIR) dataset, and split into training, validation, and test sets for a seatbelt state detection algorithm based on a recurrent convolutional neural network (CNN). In addition, a smaller set of real event data was collected and reserved for testing. In a binary classification task, the fastened/unfastened frames were identified with an F1 score of 0.989 and 0.944 on the simulated and real test sets respectively. When the problem extended to also classify the action of fastening/unfastening the seatbelt, respective F1 scores of 0.964 and 0.846 were achieved.
* 4 pages, 3 figures, IMVIP 2023
Decisive Data using Multi-Modality Optical Sensors for Advanced Vehicular Systems
Jul 25, 2023



Optical sensors have played a pivotal role in acquiring real world data for critical applications. This data, when integrated with advanced machine learning algorithms provides meaningful information thus enhancing human vision. This paper focuses on various optical technologies for design and development of state-of-the-art out-cabin forward vision systems and in-cabin driver monitoring systems. The focused optical sensors include Longwave Thermal Imaging (LWIR) cameras, Near Infrared (NIR), Neuromorphic/ event cameras, Visible CMOS cameras and Depth cameras. Further the paper discusses different potential applications which can be employed using the unique strengths of each these optical modalities in real time environment.