 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScan2Part: Fine-grained and Hierarchical Part-level Understanding of Real-World 3D Scans
Jun 06, 2022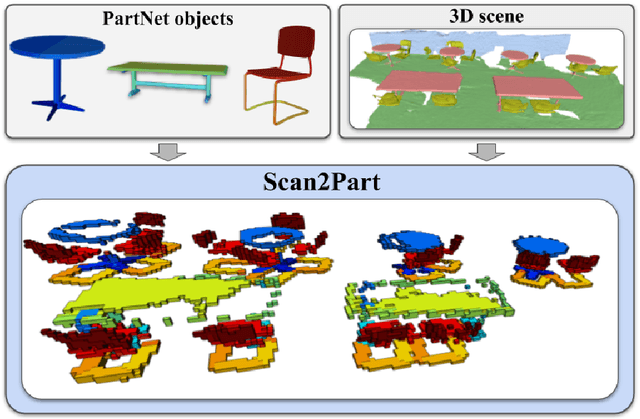
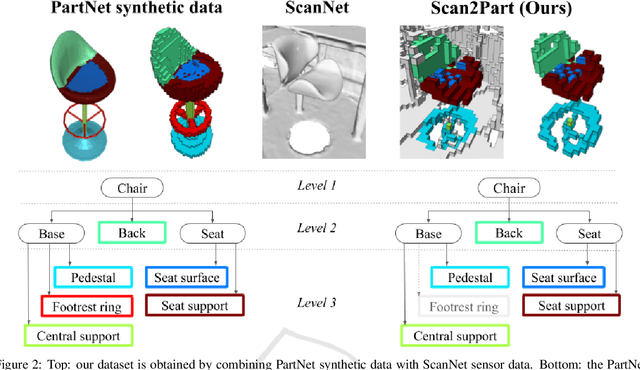
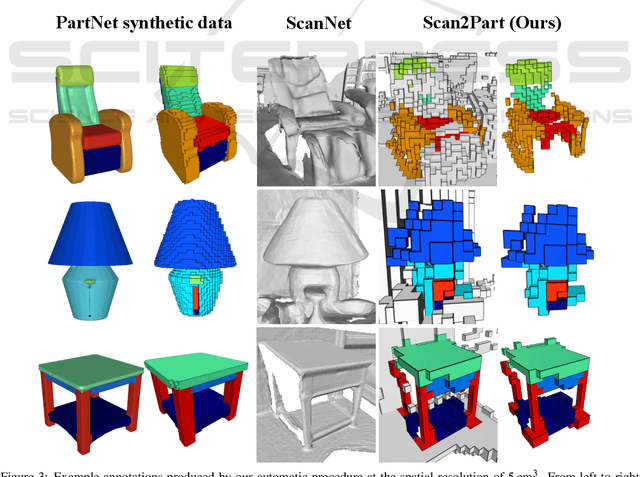
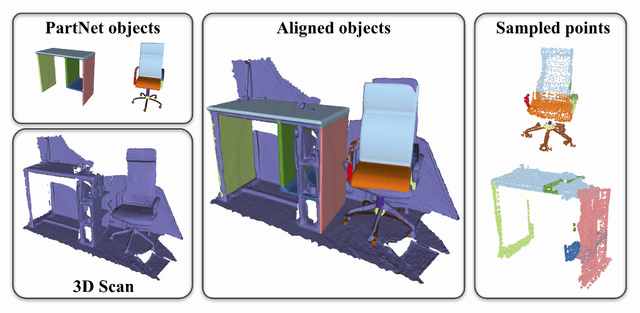
We propose Scan2Part, a method to segment individual parts of objects in real-world, noisy indoor RGB-D scans. To this end, we vary the part hierarchies of objects in indoor scenes and explore their effect on scene understanding models. Specifically, we use a sparse U-Net-based architecture that captures the fine-scale detail of the underlying 3D scan geometry by leveraging a multi-scale feature hierarchy. In order to train our method, we introduce the Scan2Part dataset, which is the first large-scale collection providing detailed semantic labels at the part level in the real-world setting. In total, we provide 242,081 correspondences between 53,618 PartNet parts of 2,477 ShapeNet objects and 1,506 ScanNet scenes, at two spatial resolutions of 2 cm$^3$ and 5 cm$^3$. As output, we are able to predict fine-grained per-object part labels, even when the geometry is coarse or partially missing.
Towards Part-Based Understanding of RGB-D Scans
Dec 03, 2020
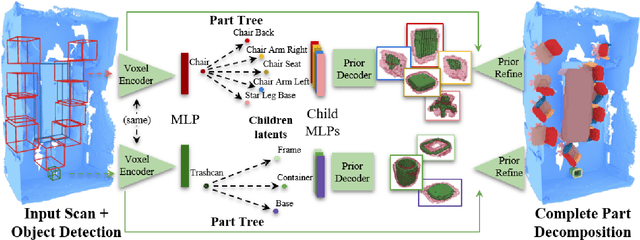

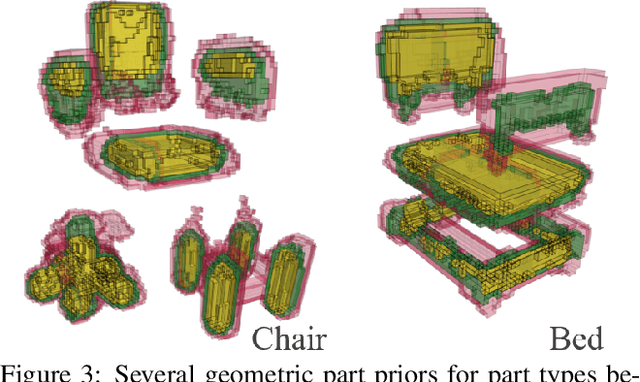
Recent advances in 3D semantic scene understanding have shown impressive progress in 3D instance segmentation, enabling object-level reasoning about 3D scenes; however, a finer-grained understanding is required to enable interactions with objects and their functional understanding. Thus, we propose the task of part-based scene understanding of real-world 3D environments: from an RGB-D scan of a scene, we detect objects, and for each object predict its decomposition into geometric part masks, which composed together form the complete geometry of the observed object. We leverage an intermediary part graph representation to enable robust completion as well as building of part priors, which we use to construct the final part mask predictions. Our experiments demonstrate that guiding part understanding through part graph to part prior-based predictions significantly outperforms alternative approaches to the task of semantic part completion.
CAD-Deform: Deformable Fitting of CAD Models to 3D Scans
Jul 23, 2020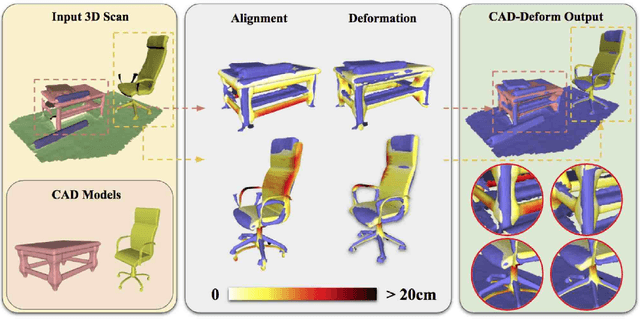
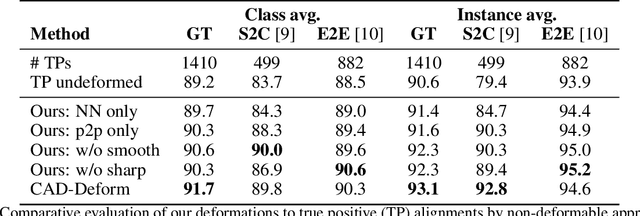

Shape retrieval and alignment are a promising avenue towards turning 3D scans into lightweight CAD representations that can be used for content creation such as mobile or AR/VR gaming scenarios. Unfortunately, CAD model retrieval is limited by the availability of models in standard 3D shape collections (e.g., ShapeNet). In this work, we address this shortcoming by introducing CAD-Deform, a method which obtains more accurate CAD-to-scan fits by non-rigidly deforming retrieved CAD models. Our key contribution is a new non-rigid deformation model incorporating smooth transformations and preservation of sharp features, that simultaneously achieves very tight fits from CAD models to the 3D scan and maintains the clean, high-quality surface properties of hand-modeled CAD objects. A series of thorough experiments demonstrate that our method achieves significantly tighter scan-to-CAD fits, allowing a more accurate digital replica of the scanned real-world environment while preserving important geometric features present in synthetic CAD environments.
Conformal k-NN Anomaly Detector for Univariate Data Streams
Jun 11, 2017
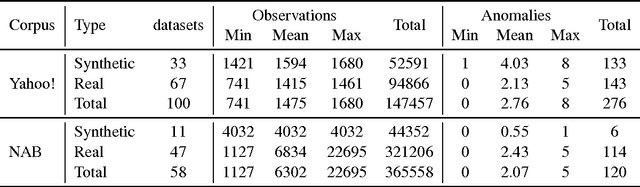


Anomalies in time-series data give essential and often actionable information in many applications. In this paper we consider a model-free anomaly detection method for univariate time-series which adapts to non-stationarity in the data stream and provides probabilistic abnormality scores based on the conformal prediction paradigm. Despite its simplicity the method performs on par with complex prediction-based models on the Numenta Anomaly Detection benchmark and the Yahoo! S5 dataset.
Conformalized density- and distance-based anomaly detection in time-series data
Aug 16, 2016



Anomalies (unusual patterns) in time-series data give essential, and often actionable information in critical situations. Examples can be found in such fields as healthcare, intrusion detection, finance, security and flight safety. In this paper we propose new conformalized density- and distance-based anomaly detection algorithms for a one-dimensional time-series data. The algorithms use a combination of a feature extraction method, an approach to assess a score whether a new observation differs significantly from a previously observed data, and a probabilistic interpretation of this score based on the conformal paradigm.