 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScan2Part: Fine-grained and Hierarchical Part-level Understanding of Real-World 3D Scans
Jun 06, 2022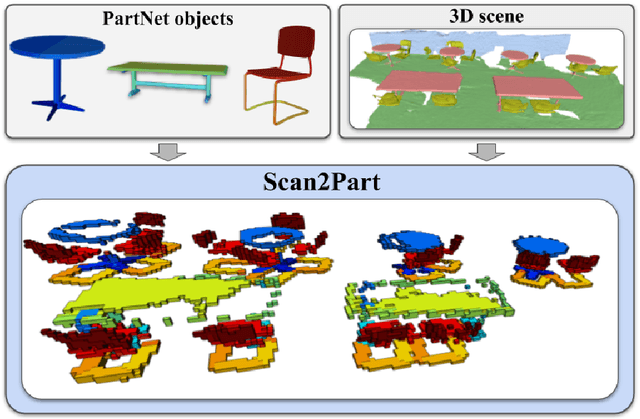
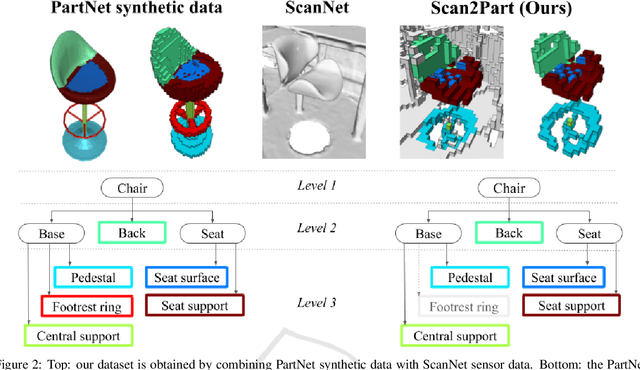
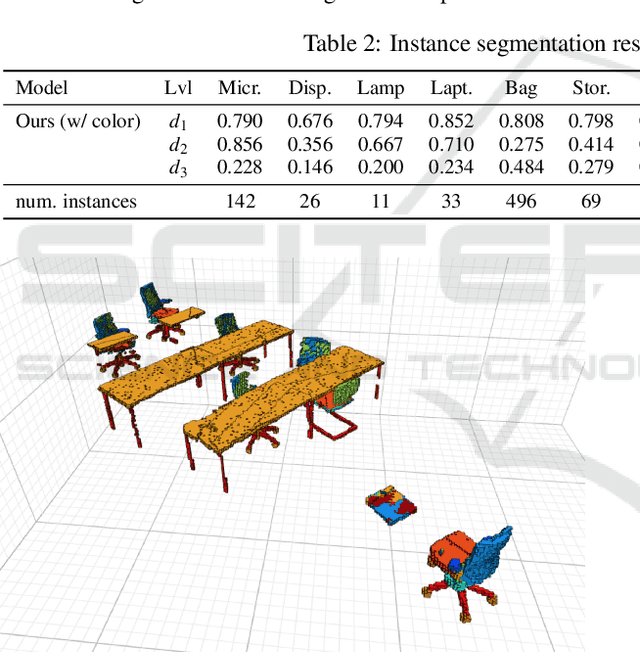
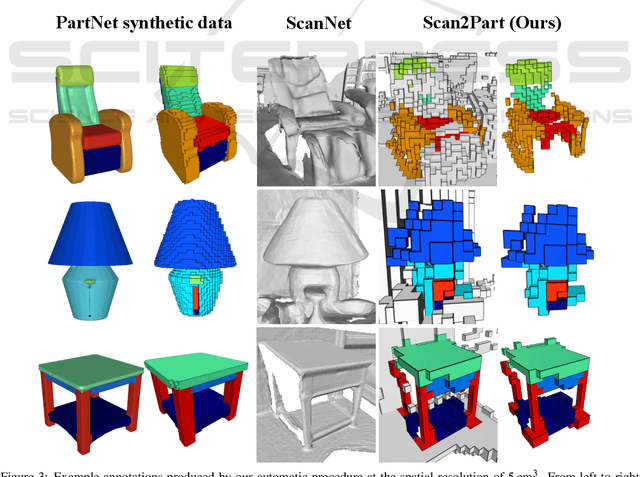
We propose Scan2Part, a method to segment individual parts of objects in real-world, noisy indoor RGB-D scans. To this end, we vary the part hierarchies of objects in indoor scenes and explore their effect on scene understanding models. Specifically, we use a sparse U-Net-based architecture that captures the fine-scale detail of the underlying 3D scan geometry by leveraging a multi-scale feature hierarchy. In order to train our method, we introduce the Scan2Part dataset, which is the first large-scale collection providing detailed semantic labels at the part level in the real-world setting. In total, we provide 242,081 correspondences between 53,618 PartNet parts of 2,477 ShapeNet objects and 1,506 ScanNet scenes, at two spatial resolutions of 2 cm$^3$ and 5 cm$^3$. As output, we are able to predict fine-grained per-object part labels, even when the geometry is coarse or partially missing.
Making DensePose fast and light
Jul 09, 2020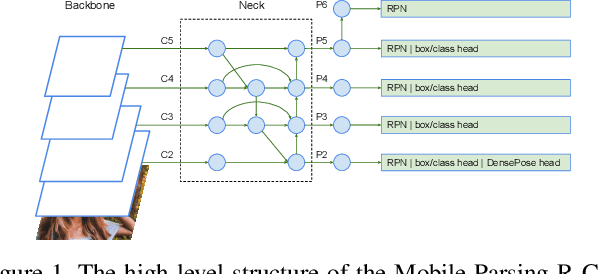
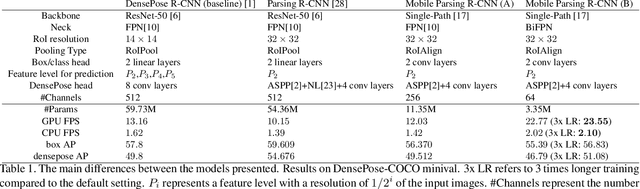
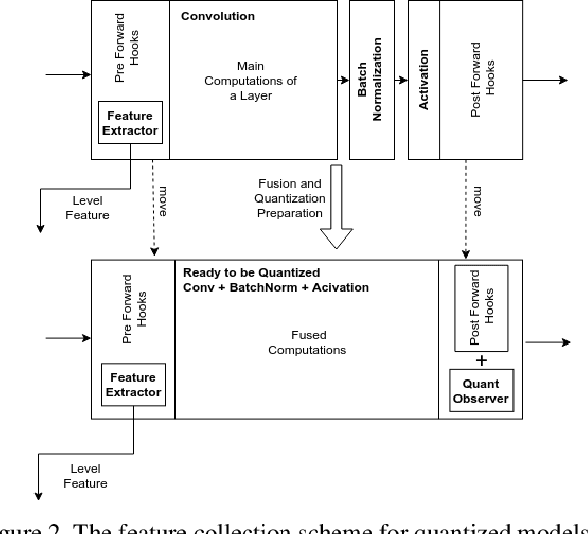
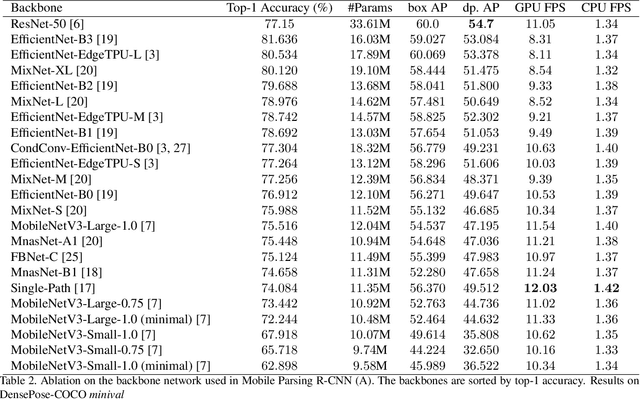
DensePose estimation task is a significant step forward for enhancing user experience computer vision applications ranging from augmented reality to cloth fitting. Existing neural network models capable of solving this task are heavily parameterized and a long way from being transferred to an embedded or mobile device. To enable Dense Pose inference on the end device with current models, one needs to support an expensive server-side infrastructure and have a stable internet connection. To make things worse, mobile and embedded devices do not always have a powerful GPU inside. In this work, we target the problem of redesigning the DensePose R-CNN model's architecture so that the final network retains most of its accuracy but becomes more light-weight and fast. To achieve that, we tested and incorporated many deep learning innovations from recent years, specifically performing an ablation study on 23 efficient backbone architectures, multiple two-stage detection pipeline modifications, and custom model quantization methods. As a result, we achieved $17\times$ model size reduction and $2\times$ latency improvement compared to the baseline model.
Large-Scale Shape Retrieval with Sparse 3D Convolutional Neural Networks
Jul 14, 2017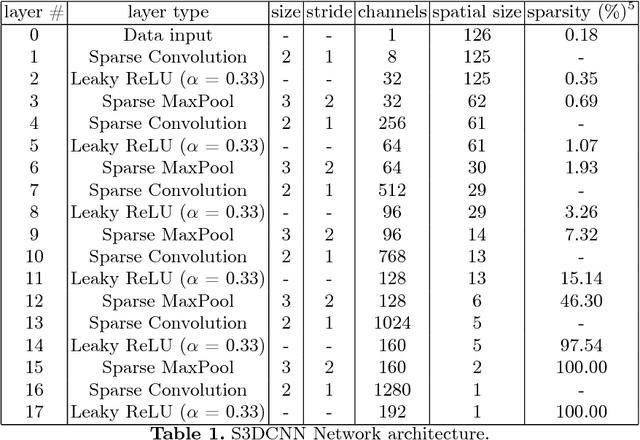

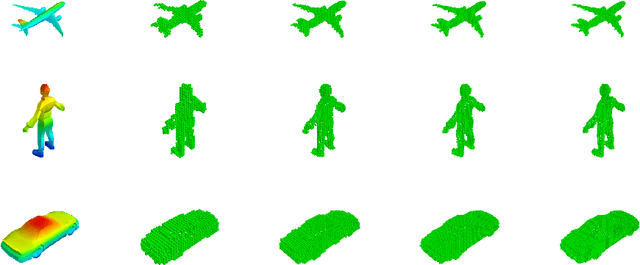
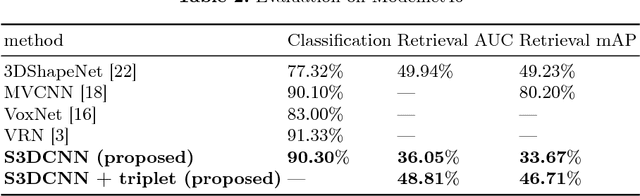
In this paper we present results of performance evaluation of S3DCNN - a Sparse 3D Convolutional Neural Network - on a large-scale 3D Shape benchmark ModelNet40, and measure how it is impacted by voxel resolution of input shape. We demonstrate comparable classification and retrieval performance to state-of-the-art models, but with much less computational costs in training and inference phases. We also notice that benefits of higher input resolution can be limited by an ability of a neural network to generalize high level features.