 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComprehensive Validation of Automated Whole Body Skeletal Muscle, Adipose Tissue, and Bone Segmentation from 3D CT images for Body Composition Analysis: Towards Extended Body Composition
Jun 03, 2021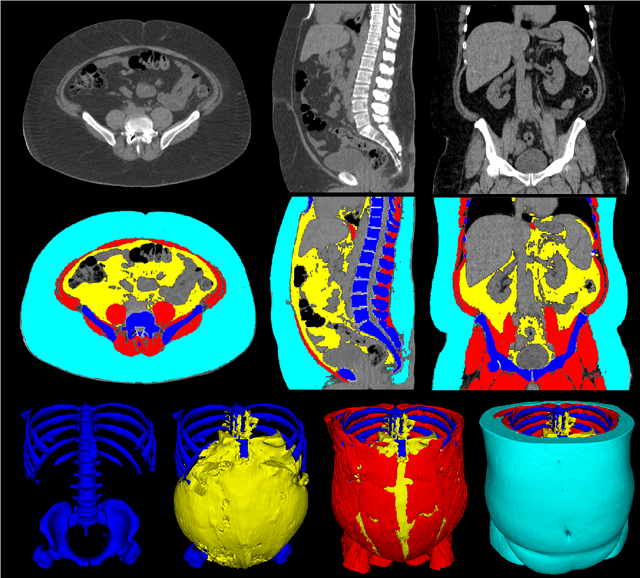
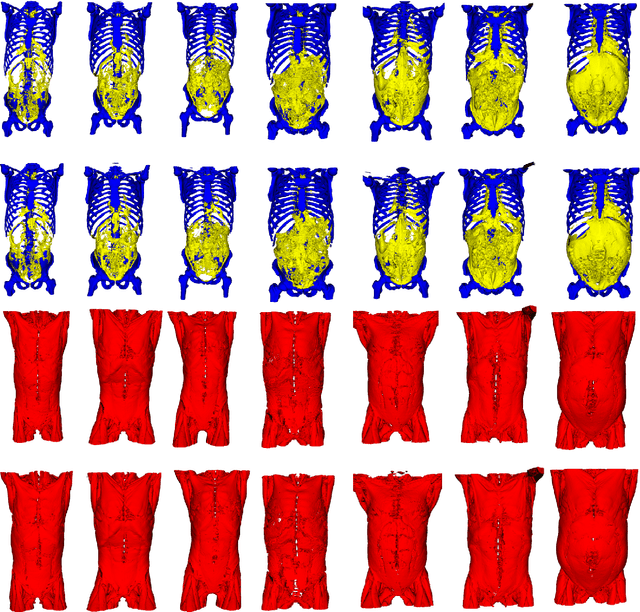
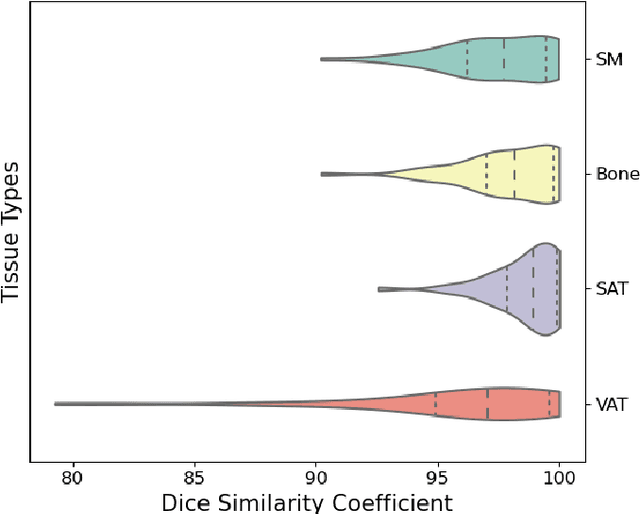
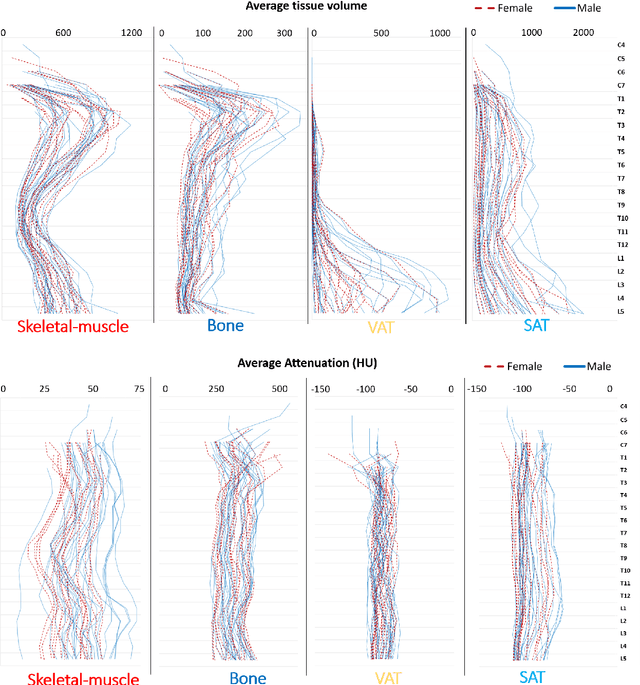
The latest advances in computer-assisted precision medicine are making it feasible to move from population-wide models that are useful to discover aggregate patterns that hold for group-based analysis to patient-specific models that can drive patient-specific decisions with regard to treatment choices, and predictions of outcomes of treatment. Body Composition is recognized as an important driver and risk factor for a wide variety of diseases, as well as a predictor of individual patient-specific clinical outcomes to treatment choices or surgical interventions. 3D CT images are routinely acquired in the oncological worklows and deliver accurate rendering of internal anatomy and therefore can be used opportunistically to assess the amount of skeletal muscle and adipose tissue compartments. Powerful tools of artificial intelligence such as deep learning are making it feasible now to segment the entire 3D image and generate accurate measurements of all internal anatomy. These will enable the overcoming of the severe bottleneck that existed previously, namely, the need for manual segmentation, which was prohibitive to scale to the hundreds of 2D axial slices that made up a 3D volumetric image. Automated tools such as presented here will now enable harvesting whole-body measurements from 3D CT or MRI images, leading to a new era of discovery of the drivers of various diseases based on individual tissue, organ volume, shape, and functional status. These measurements were hitherto unavailable thereby limiting the field to a very small and limited subset. These discoveries and the potential to perform individual image segmentation with high speed and accuracy are likely to lead to the incorporation of these 3D measures into individual specific treatment planning models related to nutrition, aging, chemotoxicity, surgery and survival after the onset of a major disease such as cancer.
Deep Local Trajectory Replanning and Control for Robot Navigation
May 13, 2019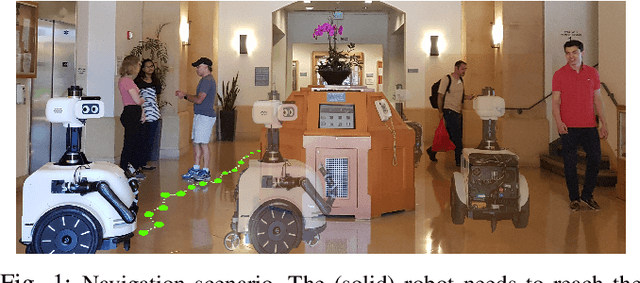
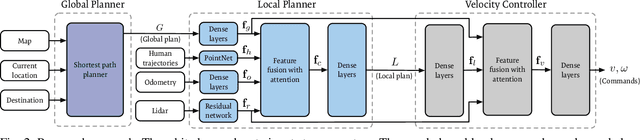
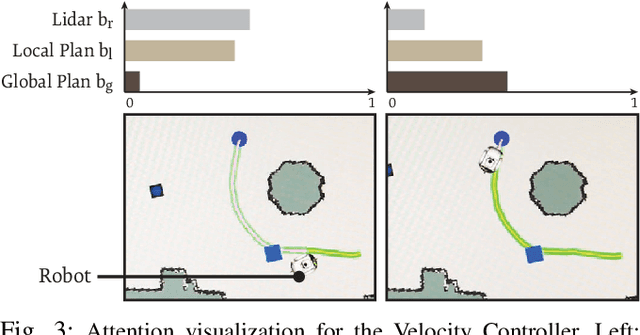
We present a navigation system that combines ideas from hierarchical planning and machine learning. The system uses a traditional global planner to compute optimal paths towards a goal, and a deep local trajectory planner and velocity controller to compute motion commands. The latter components of the system adjust the behavior of the robot through attention mechanisms such that it moves towards the goal, avoids obstacles, and respects the space of nearby pedestrians. Both the structure of the proposed deep models and the use of attention mechanisms make the system's execution interpretable. Our simulation experiments suggest that the proposed architecture outperforms baselines that try to map global plan information and sensor data directly to velocity commands. In comparison to a hand-designed traditional navigation system, the proposed approach showed more consistent performance.