 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSilentWear: an Ultra-Low Power Wearable System for EMG-based Silent Speech Recognition
Mar 04, 2026Detecting speech from biosignals is gaining increasing attention due to the potential to develop human-computer interfaces that are noise-robust, privacy-preserving, and scalable for both clinical applications and daily use. However, most existing approaches remain limited by insufficient wearability and the lack of edge-processing capabilities, which are essential for minimally obtrusive, responsive, and private assistive technologies. In this work, we present SilentWear, a fully wearable, textile-based neck interface for EMG signal acquisition and processing. Powered by BioGAP-Ultra, the system enables end-to-end data acquisition from 14 differential channels and on-device speech recognition. SilentWear is coupled with SpeechNet, a lightweight 15k-parameter CNN architecture specifically tailored for EMG-based speech decoding, achieving an average cross-validated accuracy of 84.8$\pm$4.6% and 77.5$\pm$6.6% for vocalized and silent speech, respectively, over eight representative human-machine interaction commands collected over multiple days. We evaluate robustness to repositioning induced by multi-day use. In an inter-session setting, the system achieves average accuracies of 71.1$\pm$8.3% and 59.3\pm2.2% for vocalized and silent speech, respectively. To mitigate performance degradation due to repositioning, we propose an incremental fine-tuning strategy, demonstrating more than 10% accuracy recovery with less than 10 minutes of additional user data. Finally, we demonstrate end-to-end real-time on-device speech recognition on a commercial multi-core microcontroller unit (MCU), achieving an energy consumption of 63.9$μ$J per inference with a latency of 2.47 ms. With a total power consumption of 20.5mW for acquisition, inference, and wireless transmission of results, SilentWear enables continuous operation for more than 27 hours.
Wearable and Ultra-Low-Power Fusion of EMG and A-Mode US for Hand-Wrist Kinematic Tracking
Oct 02, 2025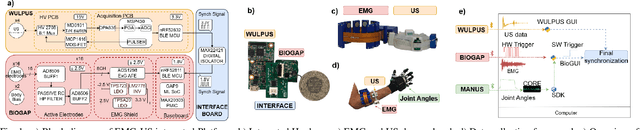
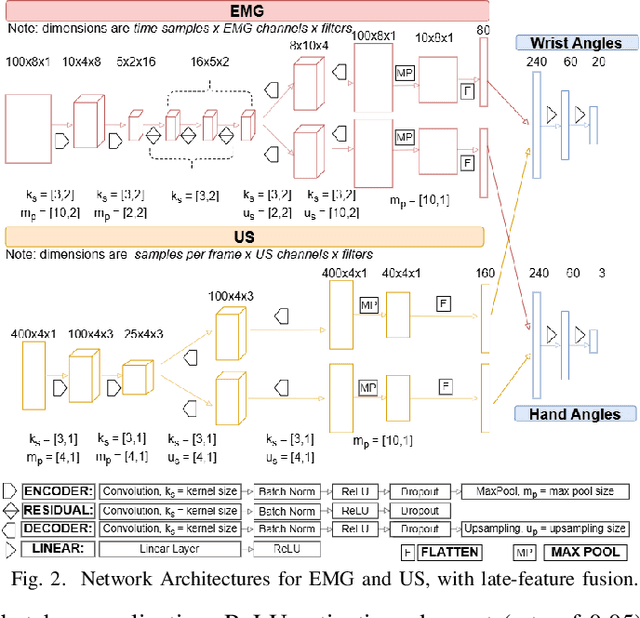
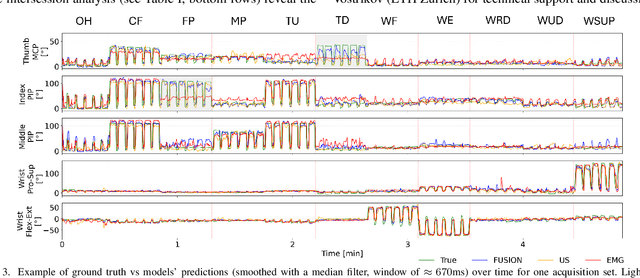
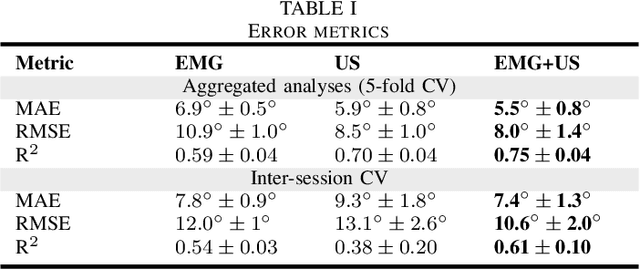
Hand gesture recognition based on biosignals has shown strong potential for developing intuitive human-machine interaction strategies that closely mimic natural human behavior. In particular, sensor fusion approaches have gained attention for combining complementary information and overcoming the limitations of individual sensing modalities, thereby enabling more robust and reliable systems. Among them, the fusion of surface electromyography (EMG) and A-mode ultrasound (US) is very promising. However, prior solutions rely on power-hungry platforms unsuitable for multi-day use and are limited to discrete gesture classification. In this work, we present an ultra-low-power (sub-50 mW) system for concurrent acquisition of 8-channel EMG and 4-channel A-mode US signals, integrating two state-of-the-art platforms into fully wearable, dry-contact armbands. We propose a framework for continuous tracking of 23 degrees of freedom (DoFs), 20 for the hand and 3 for the wrist, using a kinematic glove for ground-truth labeling. Our method employs lightweight encoder-decoder architectures with multi-task learning to simultaneously estimate hand and wrist joint angles. Experimental results under realistic sensor repositioning conditions demonstrate that EMG-US fusion achieves a root mean squared error of $10.6^\circ\pm2.0^\circ$, compared to $12.0^\circ\pm1^\circ$ for EMG and $13.1^\circ\pm2.6^\circ$ for US, and a R$^2$ score of $0.61\pm0.1$, with $0.54\pm0.03$ for EMG and $0.38\pm0.20$ for US.
Real-Time, Single-Ear, Wearable ECG Reconstruction, R-Peak Detection, and HR/HRV Monitoring
May 03, 2025Biosignal monitoring, in particular heart activity through heart rate (HR) and heart rate variability (HRV) tracking, is vital in enabling continuous, non-invasive tracking of physiological and cognitive states. Recent studies have explored compact, head-worn devices for HR and HRV monitoring to improve usability and reduce stigma. However, this approach is challenged by the current reliance on wet electrodes, which limits usability, the weakness of ear-derived signals, making HR/HRV extraction more complex, and the incompatibility of current algorithms for embedded deployment. This work introduces a single-ear wearable system for real-time ECG (Electrocardiogram) parameter estimation, which directly runs on BioGAP, an energy-efficient device for biosignal acquisition and processing. By combining SoA in-ear electrode technology, an optimized DeepMF algorithm, and BioGAP, our proposed subject-independent approach allows for robust extraction of HR/HRV parameters directly on the device with just 36.7 uJ/inference at comparable performance with respect to the current state-of-the-art architecture, achieving 0.49 bpm and 25.82 ms for HR/HRV mean errors, respectively and an estimated battery life of 36h with a total system power consumption of 7.6 mW. Clinical relevance: The ability to reconstruct ECG signals and extract HR and HRV paves the way for continuous, unobtrusive cardiovascular monitoring with head-worn devices. In particular, the integration of cardiovascular measurements in everyday-use devices (such as earbuds) has potential in continuous at-home monitoring to enable early detection of cardiovascular irregularities.
BatDeck -- Ultra Low-power Ultrasonic Ego-velocity Estimation and Obstacle Avoidance on Nano-drones
Dec 13, 2024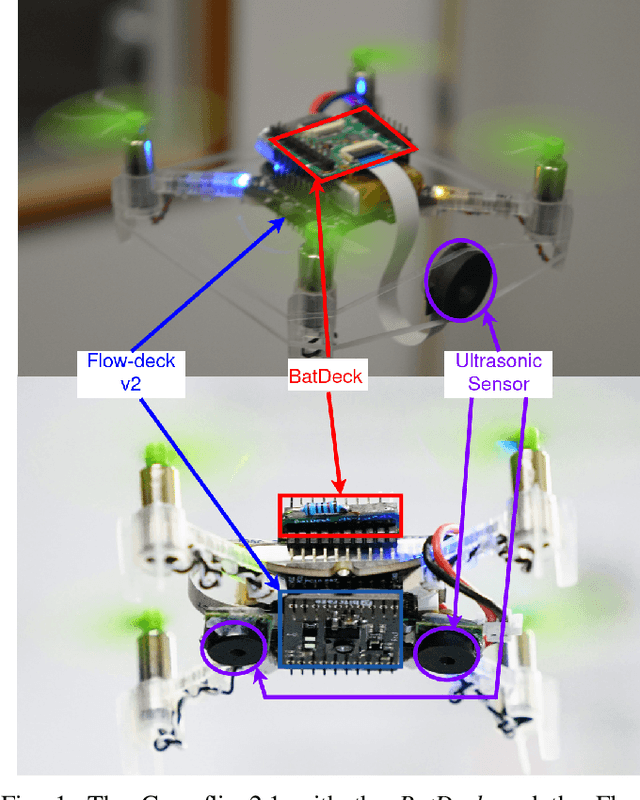
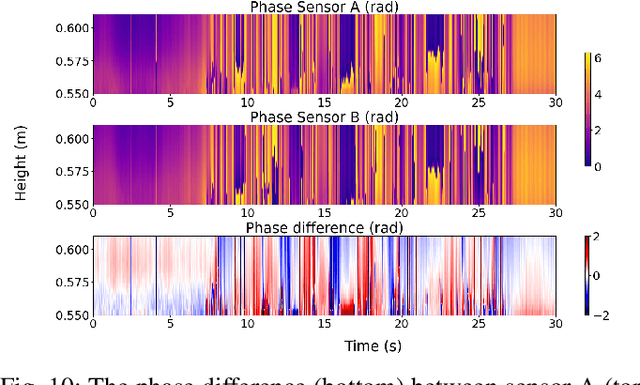
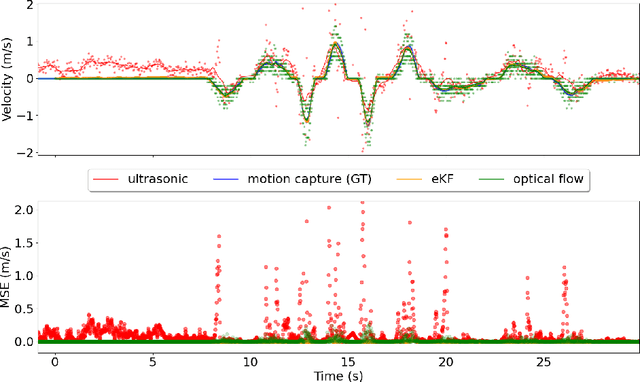
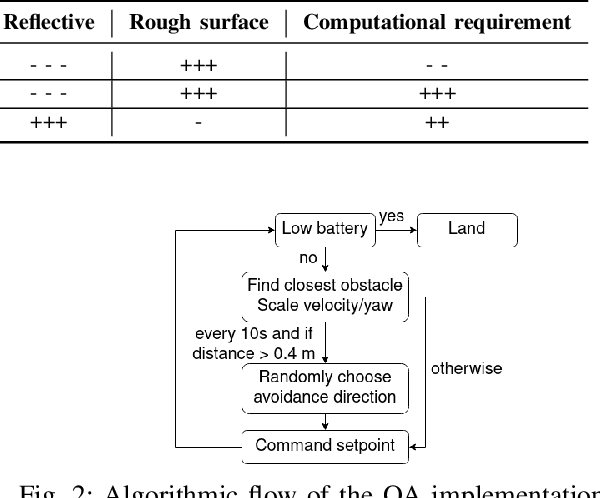
Nano-drones, with their small, lightweight design, are ideal for confined-space rescue missions and inherently safe for human interaction. However, their limited payload restricts the critical sensing needed for ego-velocity estimation and obstacle detection to single-bean laser-based time-of-flight (ToF) and low-resolution optical sensors. Although those sensors have demonstrated good performance, they fail in some complex real-world scenarios, especially when facing transparent or reflective surfaces (ToFs) or when lacking visual features (optical-flow sensors). Taking inspiration from bats, this paper proposes a novel two-way ranging-based method for ego-velocity estimation and obstacle avoidance based on down-and-forward facing ultra-low-power ultrasonic sensors, which improve the performance when the drone faces reflective materials or navigates in complete darkness. Our results demonstrate that our new sensing system achieves a mean square error of 0.019 m/s on ego-velocity estimation and allows exploration for a flight time of 8 minutes while covering 136 m on average in a challenging environment with transparent and reflective obstacles. We also compare ultrasonic and laser-based ToF sensing techniques for obstacle avoidance, as well as optical flow and ultrasonic-based techniques for ego-velocity estimation, denoting how these systems and methods can be complemented to enhance the robustness of nano-drone operations.
An Ultra-Low Power Wearable BMI System with Continual Learning Capabilities
Sep 16, 2024



Driven by the progress in efficient embedded processing, there is an accelerating trend toward running machine learning models directly on wearable Brain-Machine Interfaces (BMIs) to improve portability and privacy and maximize battery life. However, achieving low latency and high classification performance remains challenging due to the inherent variability of electroencephalographic (EEG) signals across sessions and the limited onboard resources. This work proposes a comprehensive BMI workflow based on a CNN-based Continual Learning (CL) framework, allowing the system to adapt to inter-session changes. The workflow is deployed on a wearable, parallel ultra-low power BMI platform (BioGAP). Our results based on two in-house datasets, Dataset A and Dataset B, show that the CL workflow improves average accuracy by up to 30.36% and 10.17%, respectively. Furthermore, when implementing the continual learning on a Parallel Ultra-Low Power (PULP) microcontroller (GAP9), it achieves an energy consumption as low as 0.45mJ per inference and an adaptation time of only 21.5ms, yielding around 25h of battery life with a small 100mAh, 3.7V battery on BioGAP. Our setup, coupled with the compact CNN model and on-device CL capabilities, meets users' needs for improved privacy, reduced latency, and enhanced inter-session performance, offering good promise for smart embedded real-world BMIs.
Train-On-Request: An On-Device Continual Learning Workflow for Adaptive Real-World Brain Machine Interfaces
Sep 13, 2024



Brain-machine interfaces (BMIs) are expanding beyond clinical settings thanks to advances in hardware and algorithms. However, they still face challenges in user-friendliness and signal variability. Classification models need periodic adaptation for real-life use, making an optimal re-training strategy essential to maximize user acceptance and maintain high performance. We propose TOR, a train-on-request workflow that enables user-specific model adaptation to novel conditions, addressing signal variability over time. Using continual learning, TOR preserves knowledge across sessions and mitigates inter-session variability. With TOR, users can refine, on demand, the model through on-device learning (ODL) to enhance accuracy adapting to changing conditions. We evaluate the proposed methodology on a motor-movement dataset recorded with a non-stigmatizing wearable BMI headband, achieving up to 92% accuracy and a re-calibration time as low as 1.6 minutes, a 46% reduction compared to a naive transfer learning workflow. We additionally demonstrate that TOR is suitable for ODL in extreme edge settings by deploying the training procedure on a RISC-V ultra-low-power SoC (GAP9), resulting in 21.6 ms of latency and 1 mJ of energy consumption per training step. To the best of our knowledge, this work is the first demonstration of an online, energy-efficient, dynamic adaptation of a BMI model to the intrinsic variability of EEG signals in real-time settings.
GAPses: Versatile smart glasses for comfortable and fully-dry acquisition and parallel ultra-low-power processing of EEG and EOG
Jun 12, 2024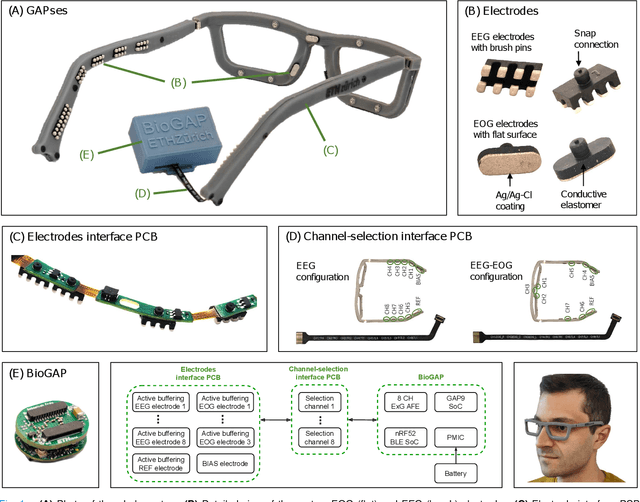
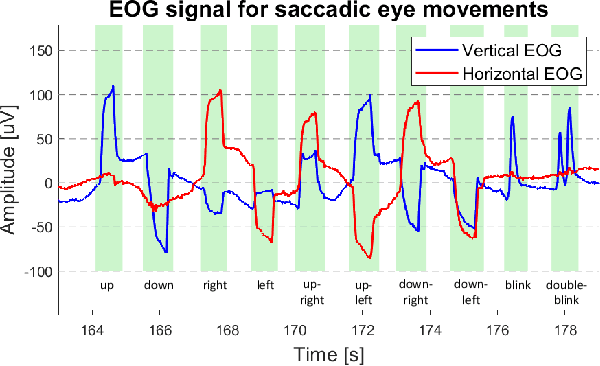
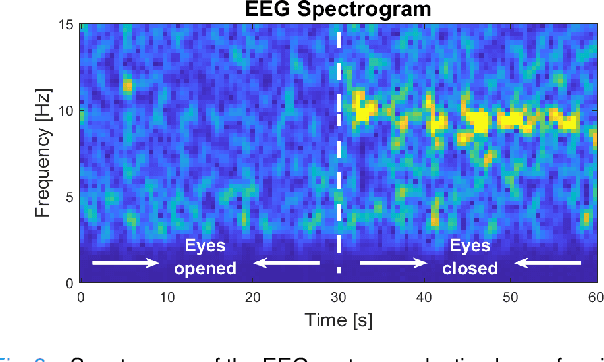
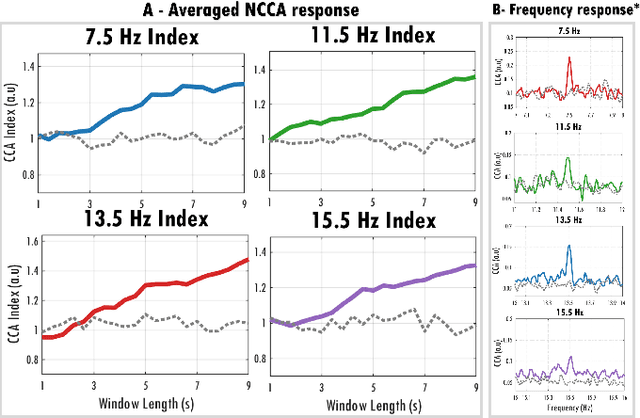
Recent advancements in head-mounted wearable technology are revolutionizing the field of biopotential measurement, but the integration of these technologies into practical, user-friendly devices remains challenging due to issues with design intrusiveness, comfort, and data privacy. To address these challenges, this paper presents GAPSES, a novel smart glasses platform designed for unobtrusive, comfortable, and secure acquisition and processing of electroencephalography (EEG) and electrooculography (EOG) signals. We introduce a direct electrode-electronics interface with custom fully dry soft electrodes to enhance comfort for long wear. An integrated parallel ultra-low-power RISC-V processor (GAP9, Greenwaves Technologies) processes data at the edge, thereby eliminating the need for continuous data streaming through a wireless link, enhancing privacy, and increasing system reliability in adverse channel conditions. We demonstrate the broad applicability of the designed prototype through validation in a number of EEG-based interaction tasks, including alpha waves, steady-state visual evoked potential analysis, and motor movement classification. Furthermore, we demonstrate an EEG-based biometric subject recognition task, where we reach a sensitivity and specificity of 98.87% and 99.86% respectively, with only 8 EEG channels and an energy consumption per inference on the edge as low as 121 uJ. Moreover, in an EOG-based eye movement classification task, we reach an accuracy of 96.68% on 11 classes, resulting in an information transfer rate of 94.78 bit/min, which can be further increased to 161.43 bit/min by reducing the accuracy to 81.43%. The deployed implementation has an energy consumption of 24 uJ per inference and a total system power of only 16.28 mW, allowing for continuous operation of more than 12 h with a small 75 mAh battery.
BatDeck: Advancing Nano-drone Navigation with Low-power Ultrasound-based Obstacle Avoidance
Mar 25, 2024


Nano-drones, distinguished by their agility, minimal weight, and cost-effectiveness, are particularly well-suited for exploration in confined, cluttered and narrow spaces. Recognizing transparent, highly reflective or absorbing materials, such as glass and metallic surfaces is challenging, as classical sensors, such as cameras or laser rangers, often do not detect them. Inspired by bats, which can fly at high speeds in complete darkness with the help of ultrasound, this paper introduces \textit{BatDeck}, a pioneering sensor-deck employing a lightweight and low-power ultrasonic sensor for nano-drone autonomous navigation. This paper first provides insights about sensor characteristics, highlighting the influence of motor noise on the ultrasound readings, then it introduces the results of extensive experimental tests for obstacle avoidance (OA) in a diverse environment. Results show that \textit{BatDeck} allows exploration for a flight time of 8 minutes while covering 136m on average before crash in a challenging environment with transparent and reflective obstacles, proving the effectiveness of ultrasonic sensors for OA on nano-drones.
Enhancing Performance, Calibration Time and Efficiency in Brain-Machine Interfaces through Transfer Learning and Wearable EEG Technology
Sep 14, 2023Brain-machine interfaces (BMIs) have emerged as a transformative force in assistive technologies, empowering individuals with motor impairments by enabling device control and facilitating functional recovery. However, the persistent challenge of inter-session variability poses a significant hurdle, requiring time-consuming calibration at every new use. Compounding this issue, the low comfort level of current devices further restricts their usage. To address these challenges, we propose a comprehensive solution that combines a tiny CNN-based Transfer Learning (TL) approach with a comfortable, wearable EEG headband. The novel wearable EEG device features soft dry electrodes placed on the headband and is capable of on-board processing. We acquire multiple sessions of motor-movement EEG data and achieve up to 96% inter-session accuracy using TL, greatly reducing the calibration time and improving usability. By executing the inference on the edge every 100ms, the system is estimated to achieve 30h of battery life. The comfortable BMI setup with tiny CNN and TL paves the way to future on-device continual learning, essential for tackling inter-session variability and improving usability.
A Wearable Ultra-Low-Power sEMG-Triggered Ultrasound System for Long-Term Muscle Activity Monitoring
Sep 14, 2023Surface electromyography (sEMG) is a well-established approach to monitor muscular activity on wearable and resource-constrained devices. However, when measuring deeper muscles, its low signal-to-noise ratio (SNR), high signal attenuation, and crosstalk degrade sensing performance. Ultrasound (US) complements sEMG effectively with its higher SNR at high penetration depths. In fact, combining US and sEMG improves the accuracy of muscle dynamic assessment, compared to using only one modality. However, the power envelope of US hardware is considerably higher than that of sEMG, thus inflating energy consumption and reducing the battery life. This work proposes a wearable solution that integrates both modalities and utilizes an EMG-driven wake-up approach to achieve ultra-low power consumption as needed for wearable long-term monitoring. We integrate two wearable state-of-the-art (SoA) US and ExG biosignal acquisition devices to acquire time-synchronized measurements of the short head of the biceps. To minimize power consumption, the US probe is kept in a sleep state when there is no muscle activity. sEMG data are processed on the probe (filtering, envelope extraction and thresholding) to identify muscle activity and generate a trigger to wake-up the US counterpart. The US acquisition starts before muscle fascicles displacement thanks to a triggering time faster than the electromechanical delay (30-100 ms) between the neuromuscular junction stimulation and the muscle contraction. Assuming a muscle contraction of 200 ms at a contraction rate of 1 Hz, the proposed approach enables more than 59% energy saving (with a full-system average power consumption of 12.2 mW) as compared to operating both sEMG and US continuously.