 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBatDeck -- Ultra Low-power Ultrasonic Ego-velocity Estimation and Obstacle Avoidance on Nano-drones
Paper and Code
Dec 13, 2024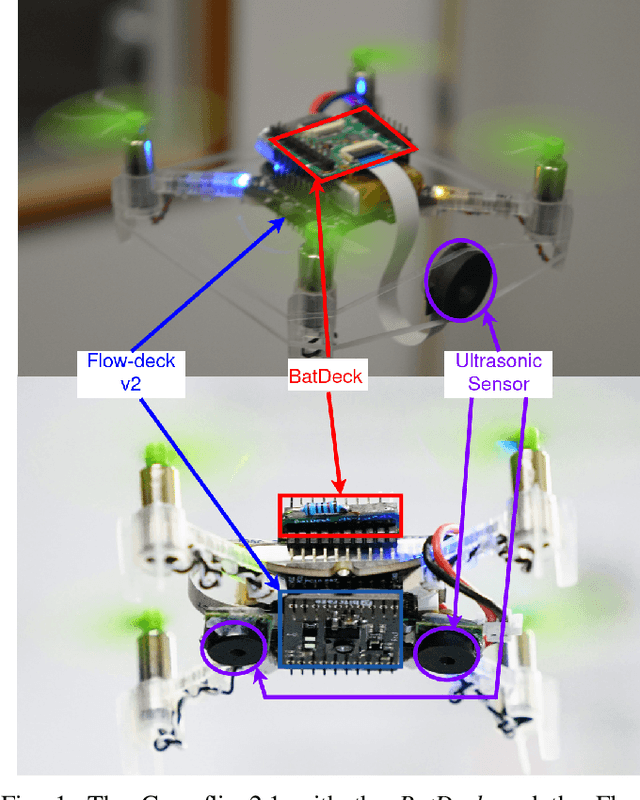
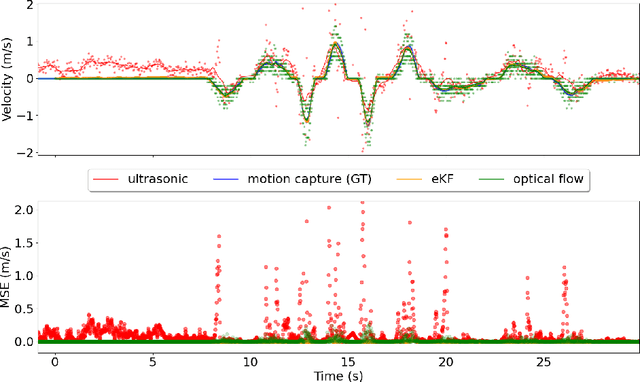
Nano-drones, with their small, lightweight design, are ideal for confined-space rescue missions and inherently safe for human interaction. However, their limited payload restricts the critical sensing needed for ego-velocity estimation and obstacle detection to single-bean laser-based time-of-flight (ToF) and low-resolution optical sensors. Although those sensors have demonstrated good performance, they fail in some complex real-world scenarios, especially when facing transparent or reflective surfaces (ToFs) or when lacking visual features (optical-flow sensors). Taking inspiration from bats, this paper proposes a novel two-way ranging-based method for ego-velocity estimation and obstacle avoidance based on down-and-forward facing ultra-low-power ultrasonic sensors, which improve the performance when the drone faces reflective materials or navigates in complete darkness. Our results demonstrate that our new sensing system achieves a mean square error of 0.019 m/s on ego-velocity estimation and allows exploration for a flight time of 8 minutes while covering 136 m on average in a challenging environment with transparent and reflective obstacles. We also compare ultrasonic and laser-based ToF sensing techniques for obstacle avoidance, as well as optical flow and ultrasonic-based techniques for ego-velocity estimation, denoting how these systems and methods can be complemented to enhance the robustness of nano-drone operations.