 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntroducing the Robot Vulnerability Database (RVD)
Dec 24, 2019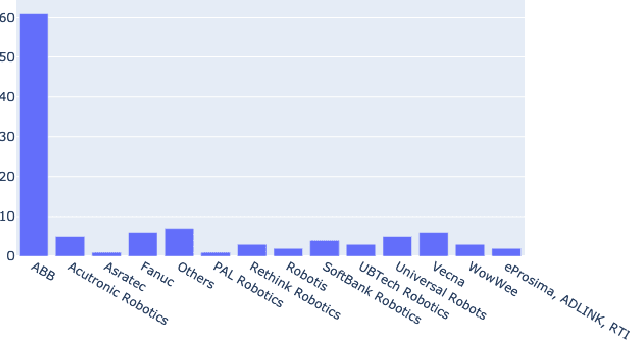
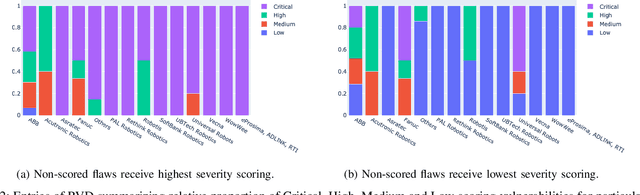
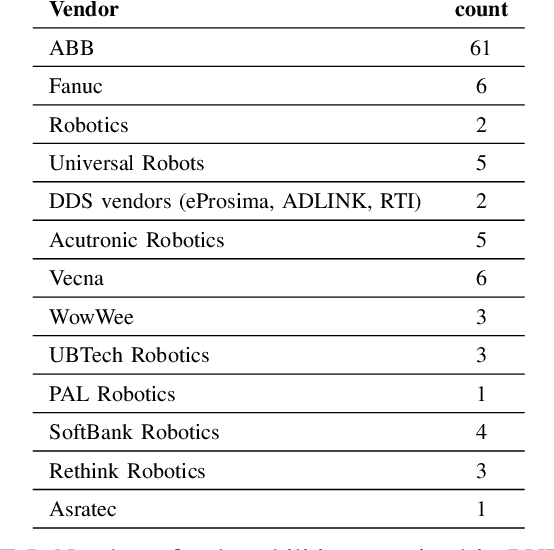
Cybersecurity in robotics is an emerging topic that has gained significant traction. Researchers have demonstrated some of the potentials and effects of cyber attacks on robots lately. This implies safety related adverse consequences causing human harm, death or lead to significant integrity loss clearly overcoming the privacy concerns in classical IT world. In cybersecurity research, the use of vulnerability databases is a very reliable tool to responsibly disclose vulnerabilities in software products and raise willingness of vendors to address these issues. In this paper we argue, that existing vulnerability databases are of insufficient information density and show some biased content with respect to vulnerabilities in robots. This paper presents the Robot Vulnerability Database (RVD), a directory for responsible disclosure of bugs, weaknesses and vulnerabilities in robots. This article aims to describe the design and process as well as the associated disclosure policy behind RVD. Furthermore the authors present preliminary selected vulnerabilities already contained in RVD and call to the robotics and security communities for contribution to the endeavour of eliminating zero-day vulnerabilities in robotics.
gym-gazebo2, a toolkit for reinforcement learning using ROS 2 and Gazebo
Mar 18, 2019

This paper presents an upgraded, real world application oriented version of gym-gazebo, the Robot Operating System (ROS) and Gazebo based Reinforcement Learning (RL) toolkit, which complies with OpenAI Gym. The content discusses the new ROS 2 based software architecture and summarizes the results obtained using Proximal Policy Optimization (PPO). Ultimately, the output of this work presents a benchmarking system for robotics that allows different techniques and algorithms to be compared using the same virtual conditions. We have evaluated environments with different levels of complexity of the Modular Articulated Robotic Arm (MARA), reaching accuracies in the millimeter scale. The converged results show the feasibility and usefulness of the gym-gazebo 2 toolkit, its potential and applicability in industrial use cases, using modular robots.
ROS2Learn: a reinforcement learning framework for ROS 2
Mar 18, 2019
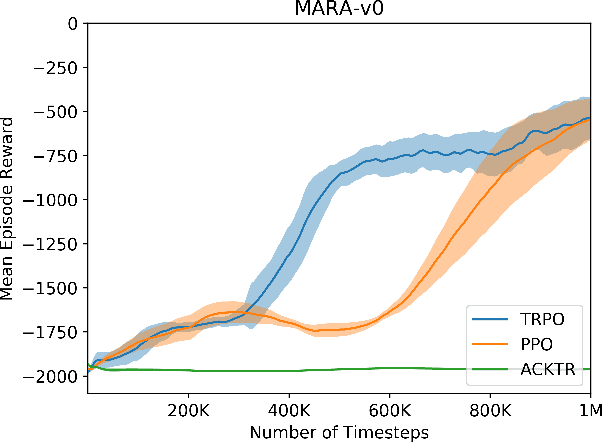
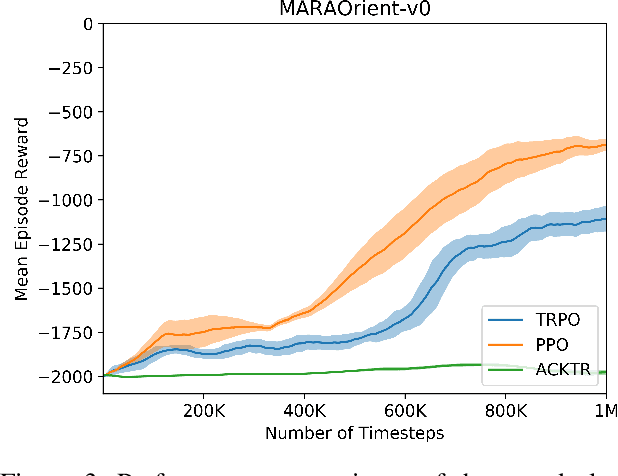
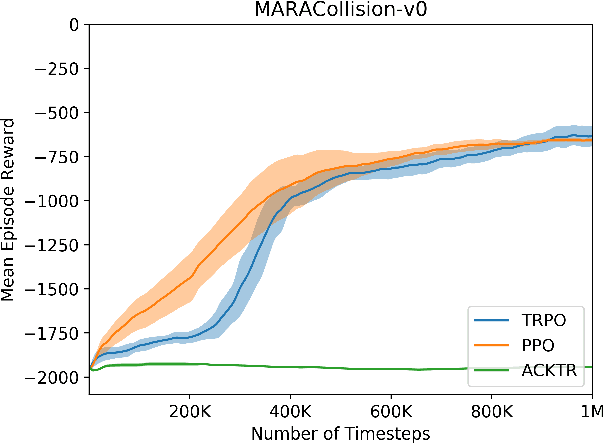
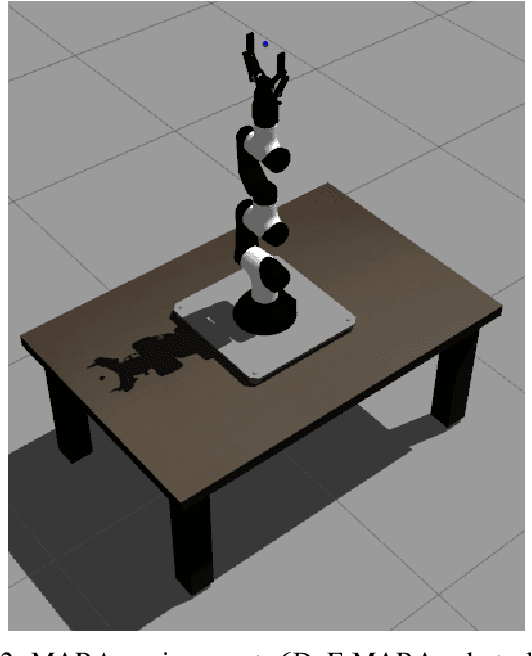
We propose a novel framework for Deep Reinforcement Learning (DRL) in modular robotics to train a robot directly from joint states, using traditional robotic tools. We use an state-of-the-art implementation of the Proximal Policy Optimization, Trust Region Policy Optimization and Actor-Critic Kronecker-Factored Trust Region algorithms to learn policies in four different Modular Articulated Robotic Arm (MARA) environments. We support this process using a framework that communicates with typical tools used in robotics, such as Gazebo and Robot Operating System 2 (ROS 2). We evaluate several algorithms in modular robots with an empirical study in simulation.
Volatile memory forensics for the Robot Operating System
Dec 22, 2018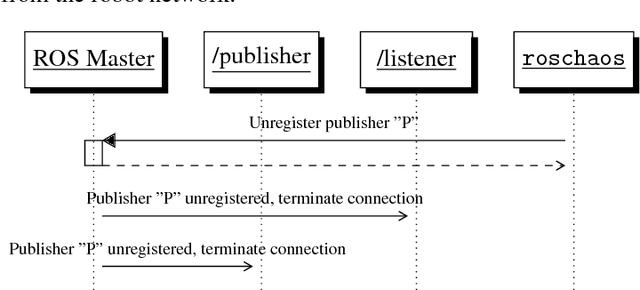
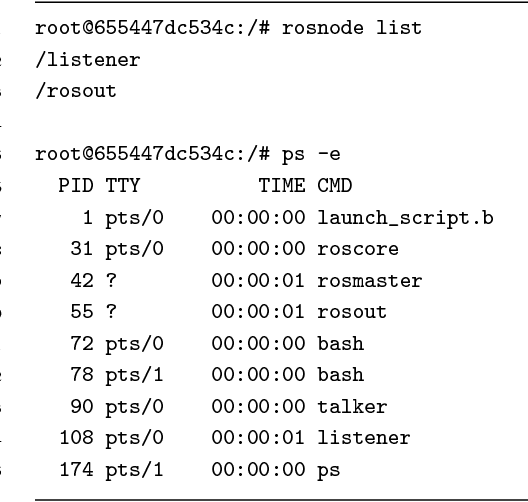
The increasing impact of robotics on industry and on society will unavoidably lead to the involvement of robots in incidents and mishaps. In such cases, forensic analyses are key techniques to provide useful evidence on what happened, and try to prevent future incidents. This article discusses volatile memory forensics for the Robot Operating System (ROS). The authors start by providing a general overview of forensic techniques in robotics and then present a robotics-specific Volatility plugin named linux_rosnode, packaged within the ros_volatility project and aimed to extract evidence from robot's volatile memory. They demonstrate how this plugin can be used to detect a specific attack pattern on ROS, where a publisher node is unregistered externally, leading to denial of service and disruption of robotic behaviors. Step-by-step, common practices are introduced for performing forensic analysis and several techniques to capture memory are described. The authors finalize by introducing some future remarks while providing references to reproduce their work.
Aztarna, a footprinting tool for robots
Dec 22, 2018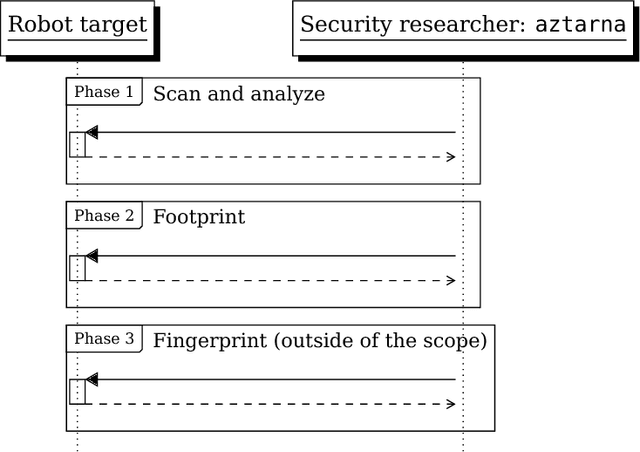
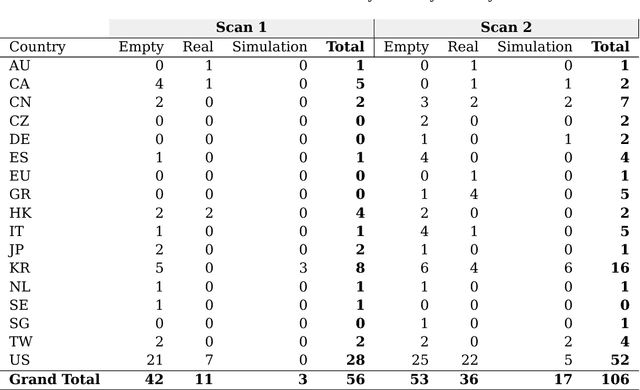
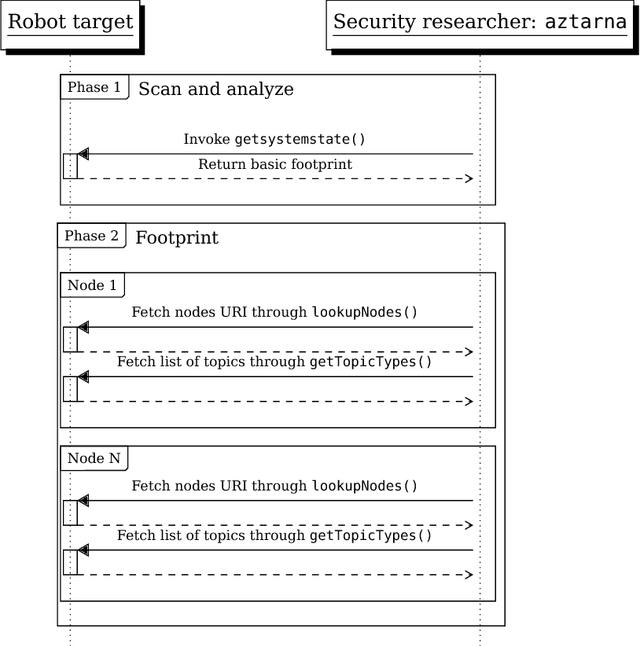
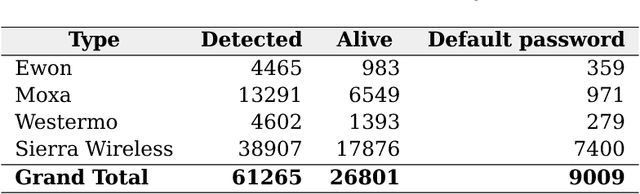
Industry 4.0 is changing the commonly held assumption that robots are to be deployed in closed and isolated networks. When analyzed from a security point of view, the global picture is disheartening: robotics industry has not seriously allocated effort to follow good security practices in the robots produced. Instead, most manufacturers keep forwarding the problem to the end-users of these machines. As learned in previous technological revolutions, such as at the dawn of PCs or smartphones, action needs to be taken in time to avoid disastrous consequences. In an attempt to provide the robotics and security communities with the right tools to perform assessments, in this paper we present aztarna, a footprinting tool for robotics. We discuss how such tool can facilitate the process of identifying vestiges of different robots, while maintaining an extensible structure aimed for future fingerprinting extensions. With this contribution, we aim to raise awareness and interest of the robotics community, robot manufacturers and robot end-users on the need of starting global actions to embrace security. We open source the tool and disclose preliminary results that demonstrate the current insecurity landscape in industry. We argue that the robotic ecosystem is in need of generating a robot security community, conscious about good practices and empowered by the right tools.
Robotics CTF , a playground for robot hacking
Oct 01, 2018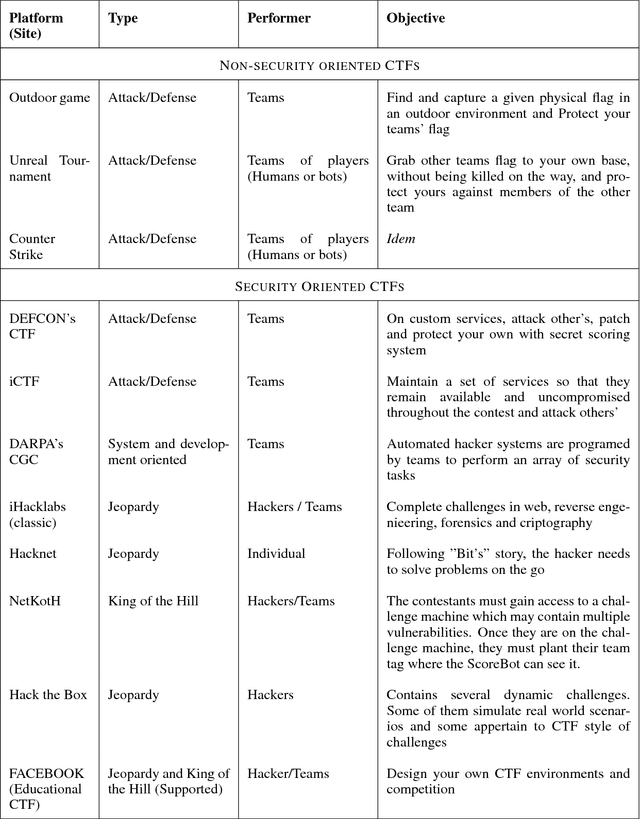
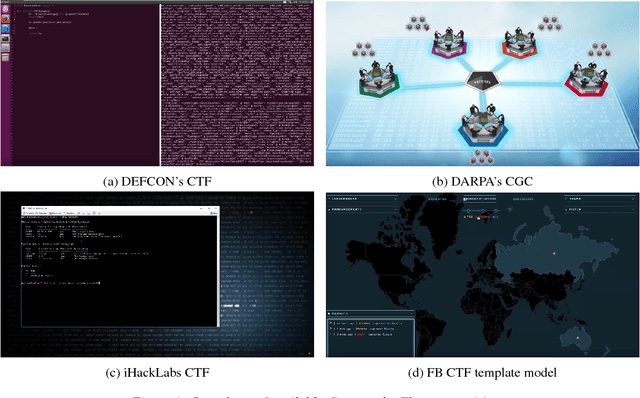
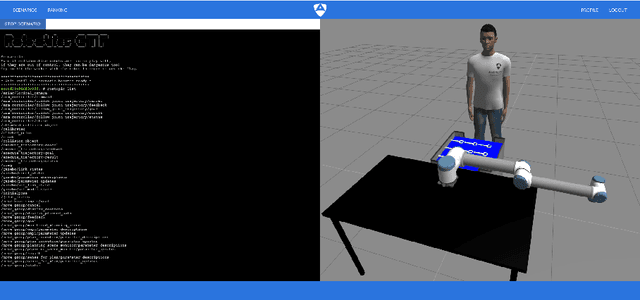
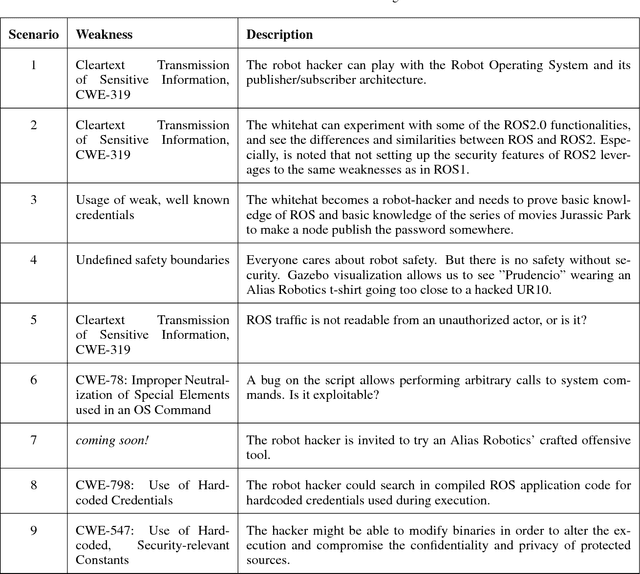
Robots state of insecurity is onstage. There is an emerging concern about major robot vulnerabilities and their adverse consequences. However, there is still a considerable gap between robotics and cybersecurity domains. For the purpose of filling that gap, the present technical report presents the Robotics CTF (RCTF), an online playground to challenge robot security from any browser. We describe the architecture of the RCTF and provide 9 scenarios where hackers can challenge the security of different robotic setups. Our work empowers security researchers to a) reproduce virtual robotic scenarios locally and b) change the networking setup to mimic real robot targets. We advocate for hacker powered security in robotics and contribute by open sourcing our scenarios.
Time Synchronization in modular collaborative robots
Sep 19, 2018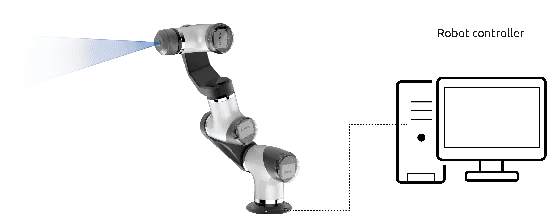
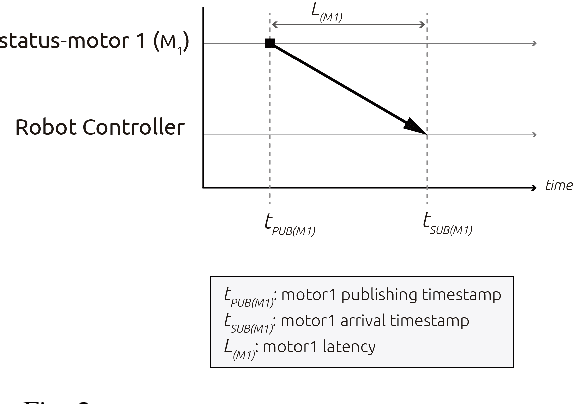
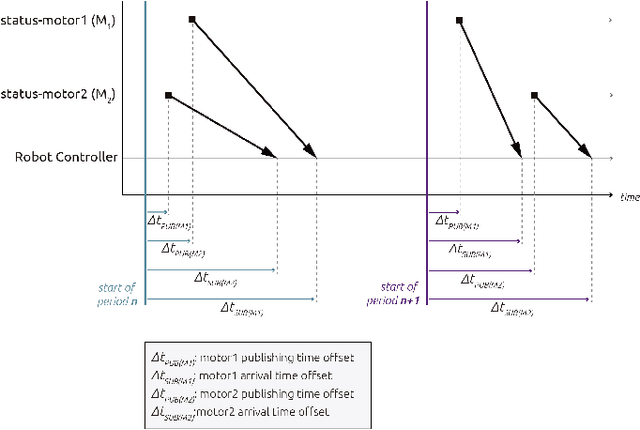
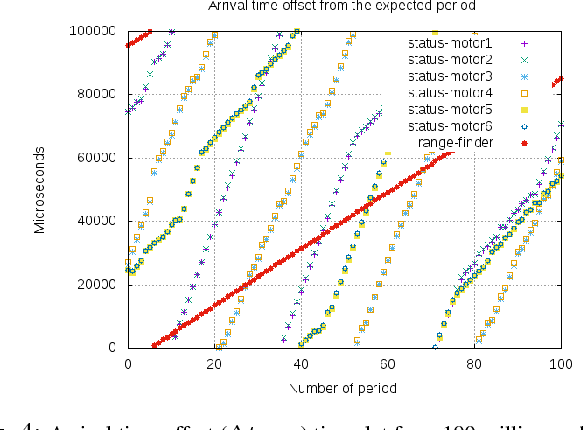
A new generation of robot systems which are modular, flexible and safe for human-robot interaction are needed. Existing cobots seem to meet only the later and require a modular approach to improve their reconfigurability and interoperability. We propose a new sub-class of cobots named M-cobots which tackle these problems. In particular, we discuss the relevance of synchronization for these systems, analyze it and demonstrate how with a properly configured M-cobot, we are able to obtain a) distributed sub-microsecond clock synchronization accuracy among modules, b) timestamping accuracy of ROS 2.0 messages under 100 microseconds and c) millisecond-level end-to-end communication latencies, even when disturbed with networking overloads of up to 90% of the network capacity.
Time-Sensitive Networking for robotics
Sep 11, 2018
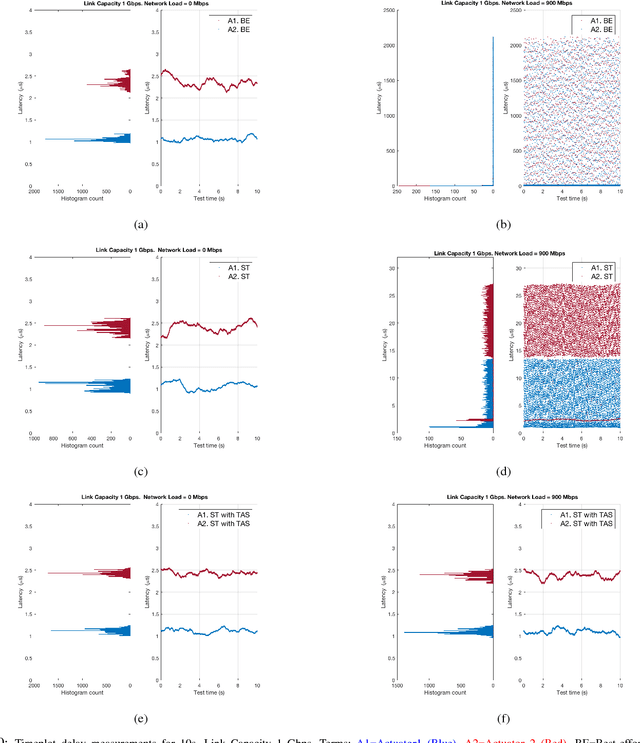
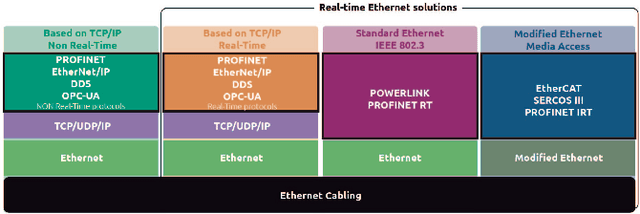
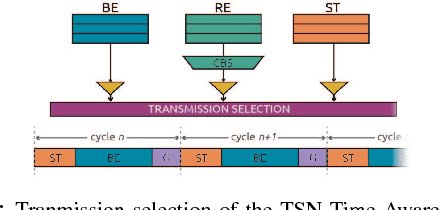
We argue that Time-Sensitive Networking (TSN) will become the de facto standard for real-time communications in robotics. We present a review and classification of the different communication standards which are relevant for the field and introduce the typical problems with traditional switched Ethernet networks. We discuss some of the TSN features relevant for deterministic communications and evaluate experimentally one of the shaping mechanisms in an exemplary robotic scenario. In particular, and based on our results, we claim that many of the existing real-time industrial solutions will slowly be replaced by TSN. And that this will lead towards a unified landscape of physically interoperable robot and robot components.
Towards a distributed and real-time framework for robots: Evaluation of ROS 2.0 communications for real-time robotic applications
Sep 07, 2018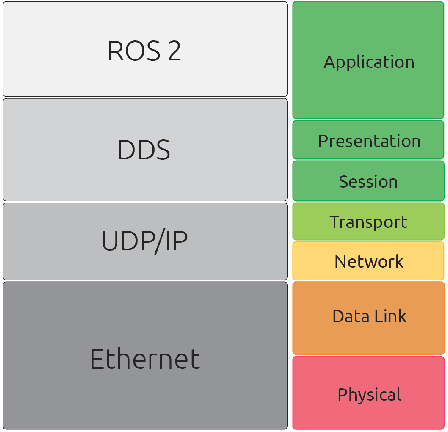
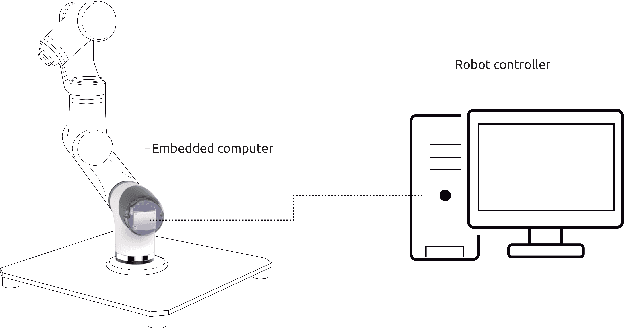
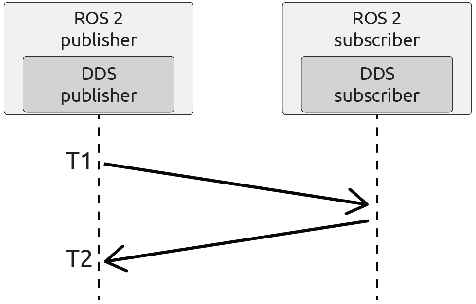
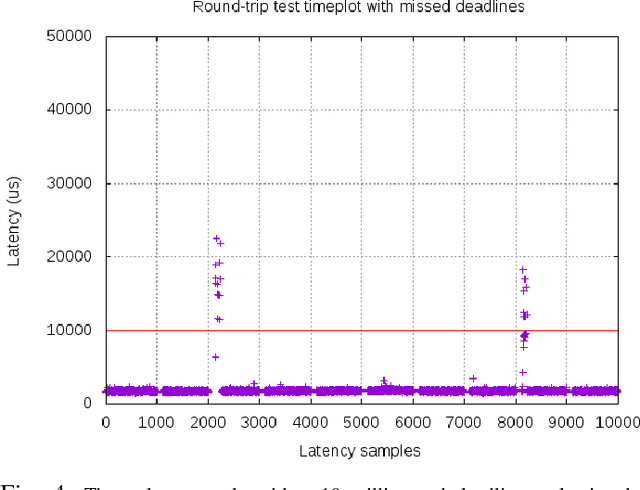
In this work we present an experimental setup to show the suitability of ROS 2.0 for real-time robotic applications. We disclose an evaluation of ROS 2.0 communications in a robotic inter-component (hardware) communication case on top of Linux. We benchmark and study the worst case latencies and missed deadlines to characterize ROS 2.0 communications for real-time applications. We demonstrate experimentally how computation and network congestion impacts the communication latencies and ultimately, propose a setup that, under certain conditions, mitigates these delays and obtains bounded traffic.
Robot_gym: accelerated robot training through simulation in the cloud with ROS and Gazebo
Aug 30, 2018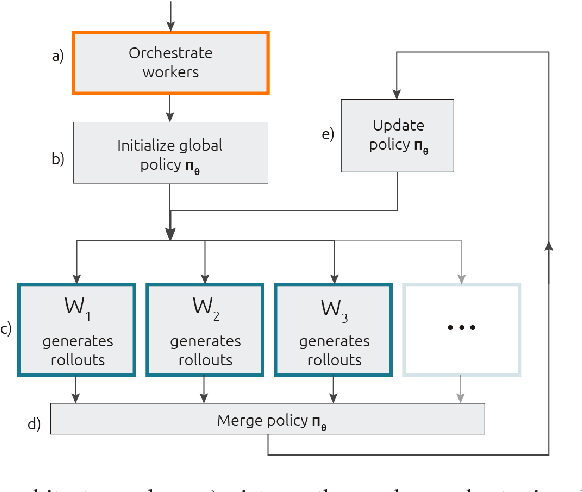

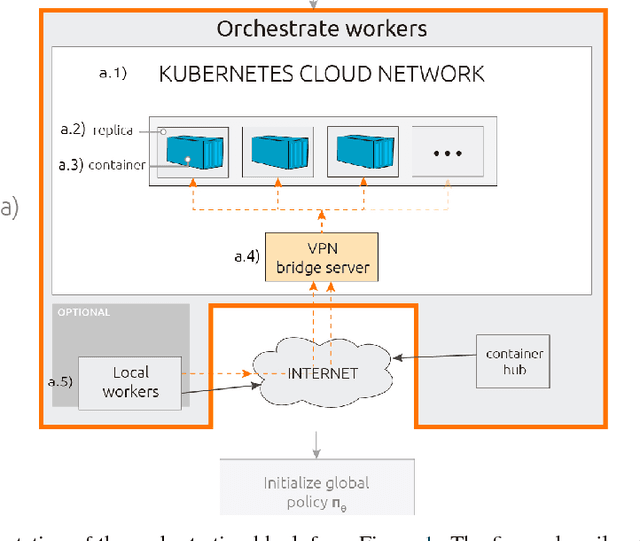
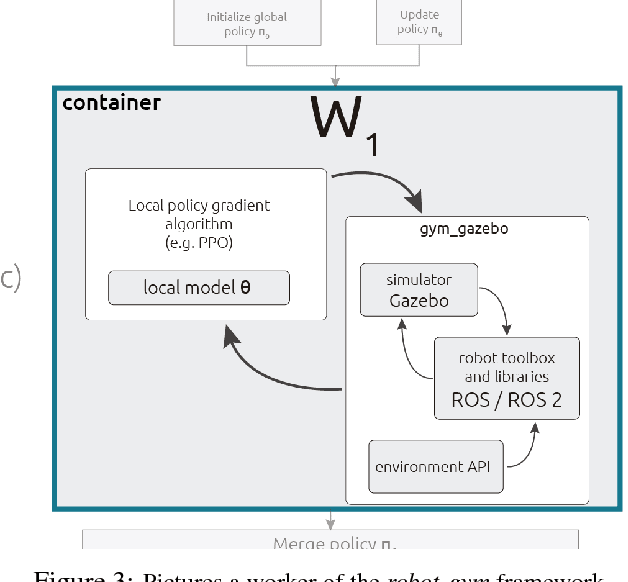
Rather than programming, training allows robots to achieve behaviors that generalize better and are capable to respond to real-world needs. However, such training requires a big amount of experimentation which is not always feasible for a physical robot. In this work, we present robot_gym, a framework to accelerate robot training through simulation in the cloud that makes use of roboticists' tools, simplifying the development and deployment processes on real robots. We unveil that, for simple tasks, simple 3DoF robots require more than 140 attempts to learn. For more complex, 6DoF robots, the number of attempts increases to more than 900 for the same task. We demonstrate that our framework, for simple tasks, accelerates the robot training time by more than 33% while maintaining similar levels of accuracy and repeatability.