Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROS2Learn: a reinforcement learning framework for ROS 2
Paper and Code

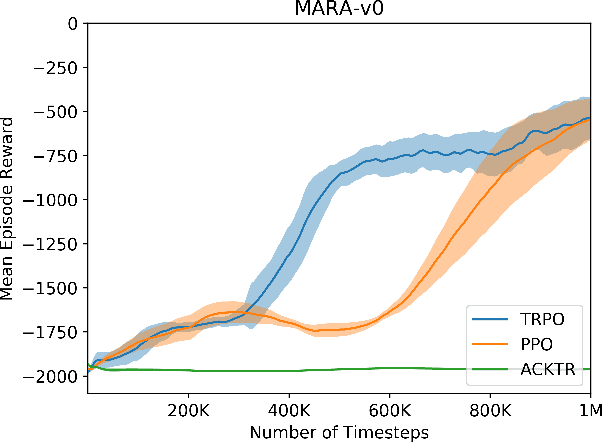
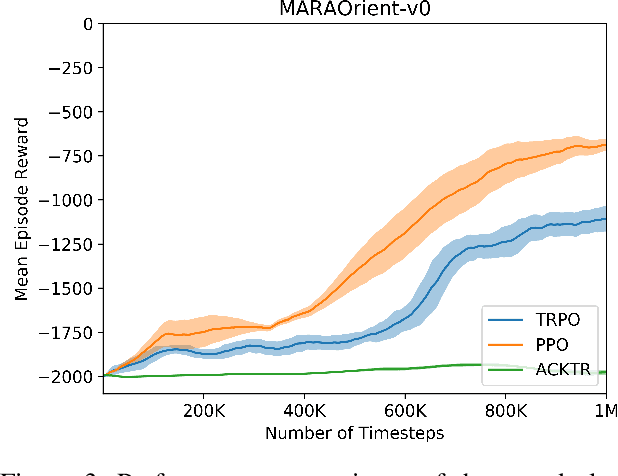
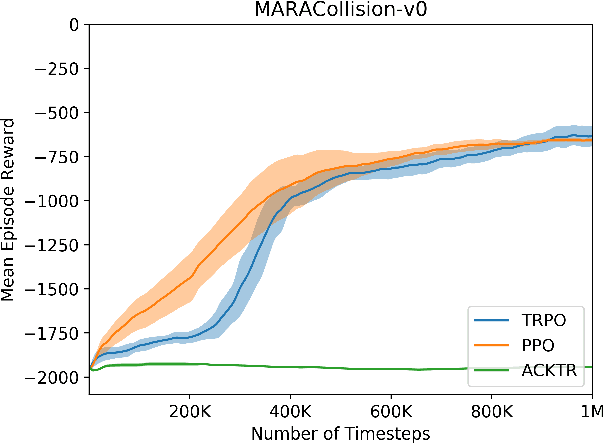
We propose a novel framework for Deep Reinforcement Learning (DRL) in modular robotics to train a robot directly from joint states, using traditional robotic tools. We use an state-of-the-art implementation of the Proximal Policy Optimization, Trust Region Policy Optimization and Actor-Critic Kronecker-Factored Trust Region algorithms to learn policies in four different Modular Articulated Robotic Arm (MARA) environments. We support this process using a framework that communicates with typical tools used in robotics, such as Gazebo and Robot Operating System 2 (ROS 2). We evaluate several algorithms in modular robots with an empirical study in simulation.
View paper on