 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAztarna, a footprinting tool for robots
Dec 22, 2018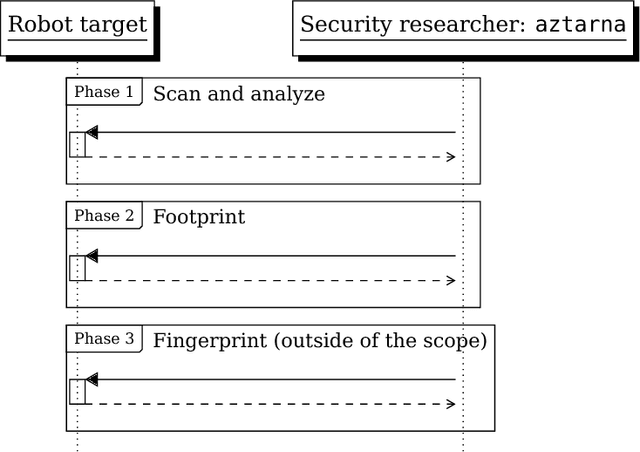
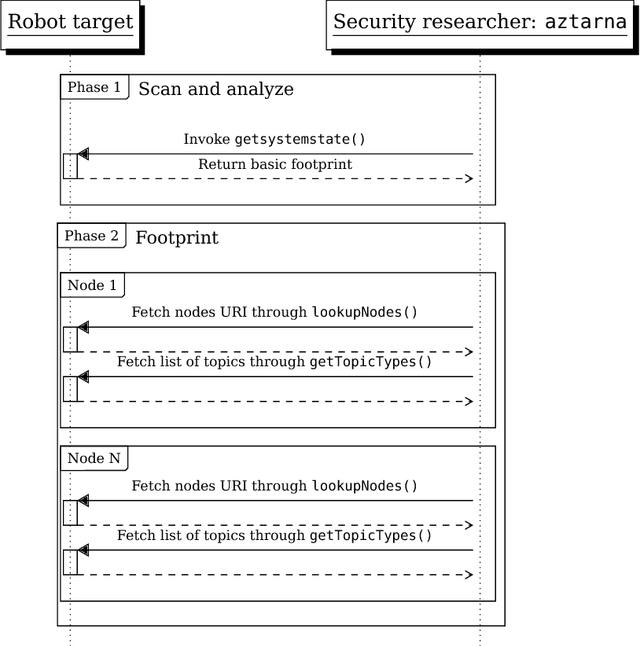
Industry 4.0 is changing the commonly held assumption that robots are to be deployed in closed and isolated networks. When analyzed from a security point of view, the global picture is disheartening: robotics industry has not seriously allocated effort to follow good security practices in the robots produced. Instead, most manufacturers keep forwarding the problem to the end-users of these machines. As learned in previous technological revolutions, such as at the dawn of PCs or smartphones, action needs to be taken in time to avoid disastrous consequences. In an attempt to provide the robotics and security communities with the right tools to perform assessments, in this paper we present aztarna, a footprinting tool for robotics. We discuss how such tool can facilitate the process of identifying vestiges of different robots, while maintaining an extensible structure aimed for future fingerprinting extensions. With this contribution, we aim to raise awareness and interest of the robotics community, robot manufacturers and robot end-users on the need of starting global actions to embrace security. We open source the tool and disclose preliminary results that demonstrate the current insecurity landscape in industry. We argue that the robotic ecosystem is in need of generating a robot security community, conscious about good practices and empowered by the right tools.
Robotics CTF , a playground for robot hacking
Oct 01, 2018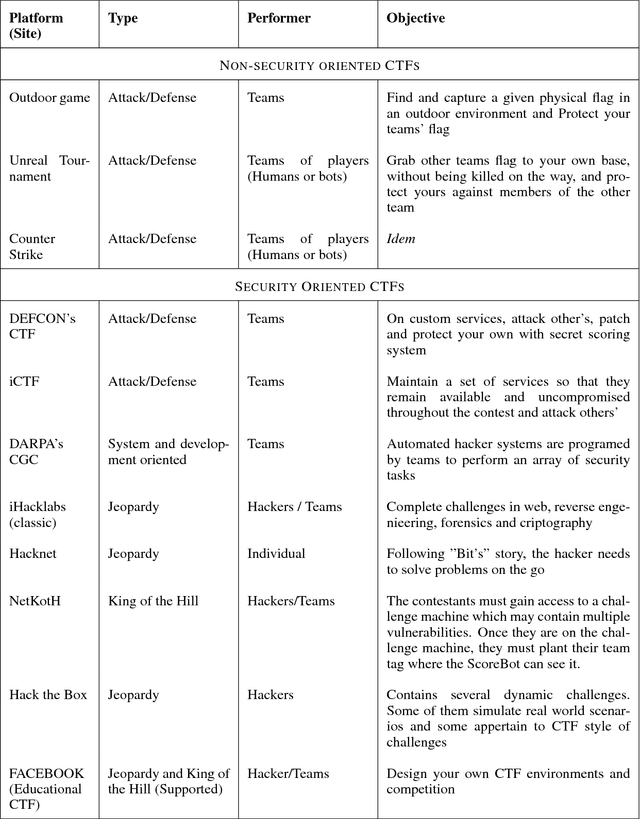
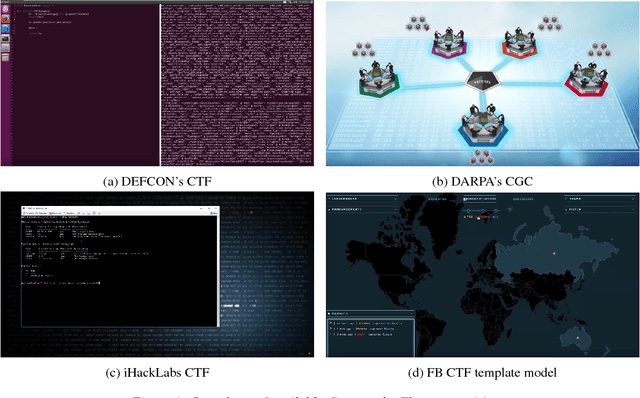
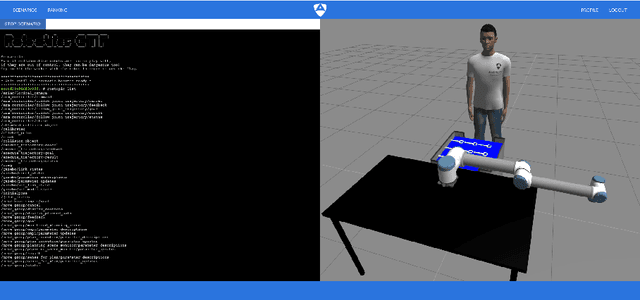
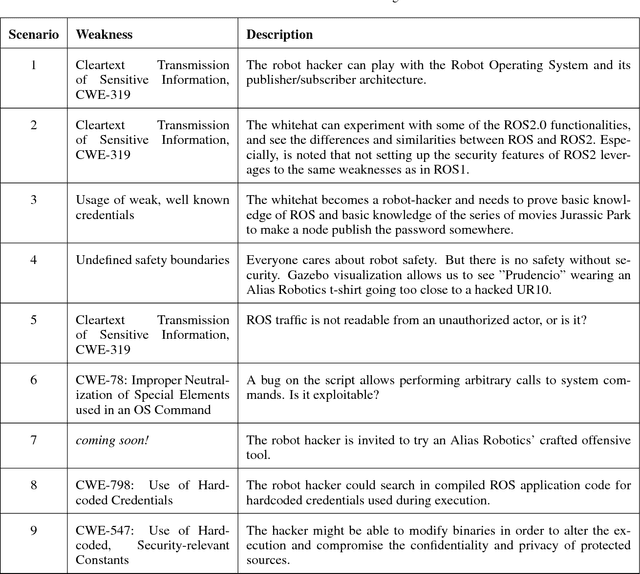
Robots state of insecurity is onstage. There is an emerging concern about major robot vulnerabilities and their adverse consequences. However, there is still a considerable gap between robotics and cybersecurity domains. For the purpose of filling that gap, the present technical report presents the Robotics CTF (RCTF), an online playground to challenge robot security from any browser. We describe the architecture of the RCTF and provide 9 scenarios where hackers can challenge the security of different robotic setups. Our work empowers security researchers to a) reproduce virtual robotic scenarios locally and b) change the networking setup to mimic real robot targets. We advocate for hacker powered security in robotics and contribute by open sourcing our scenarios.
Towards an open standard for assessing the severity of robot security vulnerabilities, the Robot Vulnerability Scoring System
Jul 26, 2018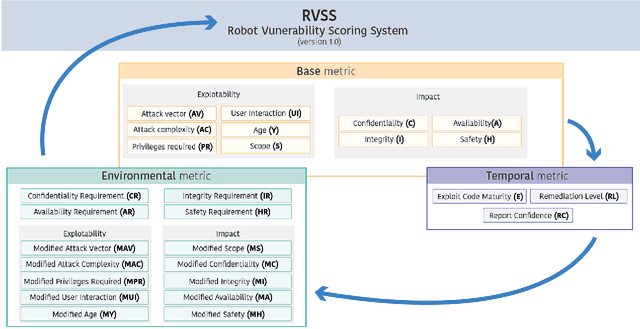
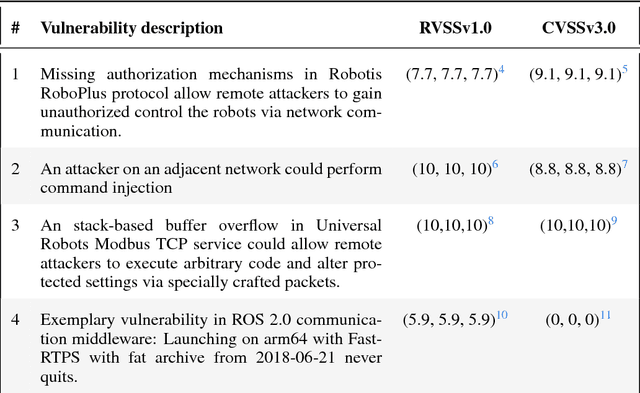
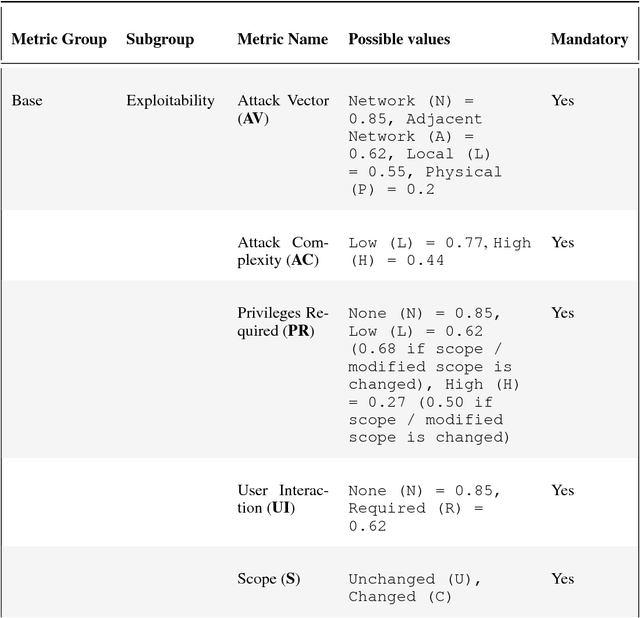
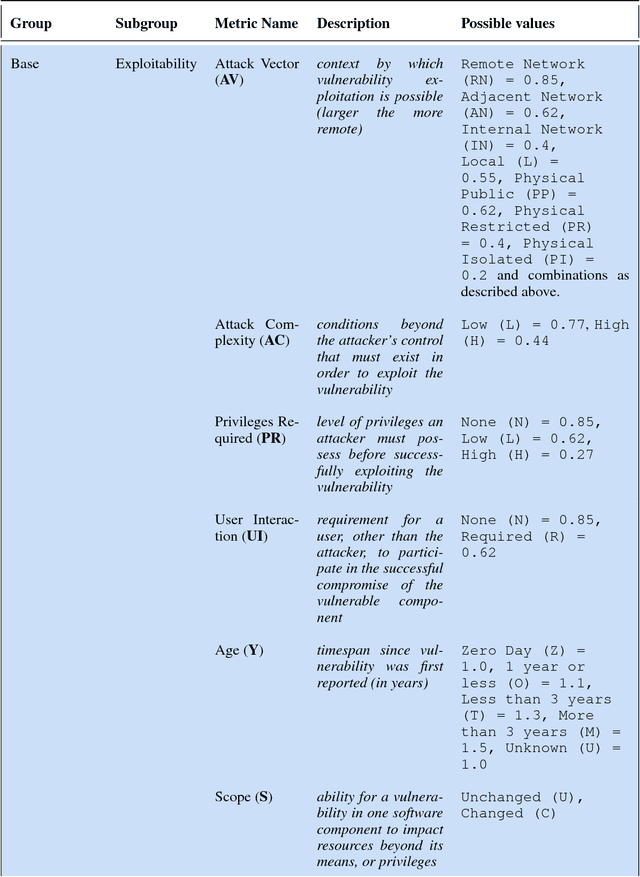
Robots are typically not created with security as a main concern. Contrasting to typical IT systems, cyberphysical systems rely on security to handle safety aspects. In light of the former, classic scoring methods such as the Common Vulnerability Scoring System (CVSS) are not able to accurately capture the severity of robot vulnerabilities. The present research work focuses upon creating an open and free to access Robot Vulnerability Scoring System (RVSS) that considers major relevant issues in robotics including a) robot safety aspects, b) assessment of downstream implications of a given vulnerability, c) library and third-party scoring assessments and d) environmental variables, such as time since vulnerability disclosure or exposure on the web. Finally, an experimental evaluation of RVSS with contrast to CVSS is provided and discussed with focus on the robotics security landscape.
Introducing the Robot Security Framework (RSF), a standardized methodology to perform security assessments in robotics
Jun 11, 2018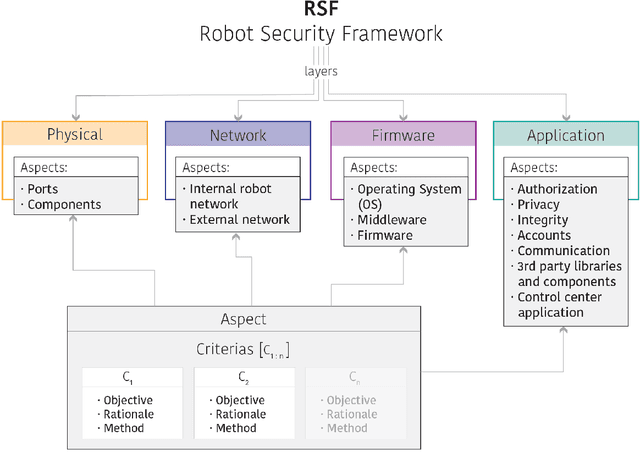
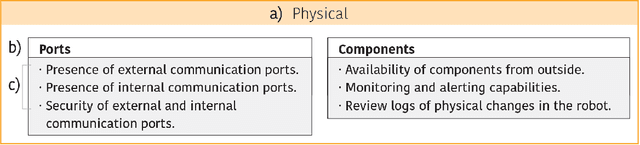
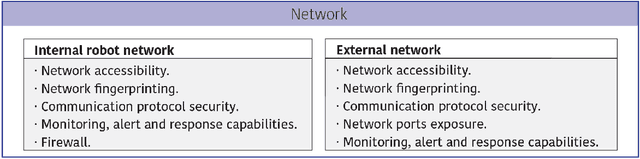

Robots have gained relevance in society, increasingly performing critical tasks. Nonetheless, robot security is being underestimated. Robotics security is a complex landscape, which often requires a cross-disciplinar perspective to which classical security lags behind. To address this issue, we present the Robot Security Framework (RSF), a methodology to perform systematic security assessments in robots. We propose, adapt and develop specific terminology and provide guidelines to enable a holistic security assessment following four main layers (Physical, Network, Firmware and Application). We argue that modern robotics should regard as equally relevant internal and external communication security. Finally, we advocate against "security by obscurity". We conclude that the field of security in robotics deserves further research efforts.