 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotics CTF , a playground for robot hacking
Oct 01, 2018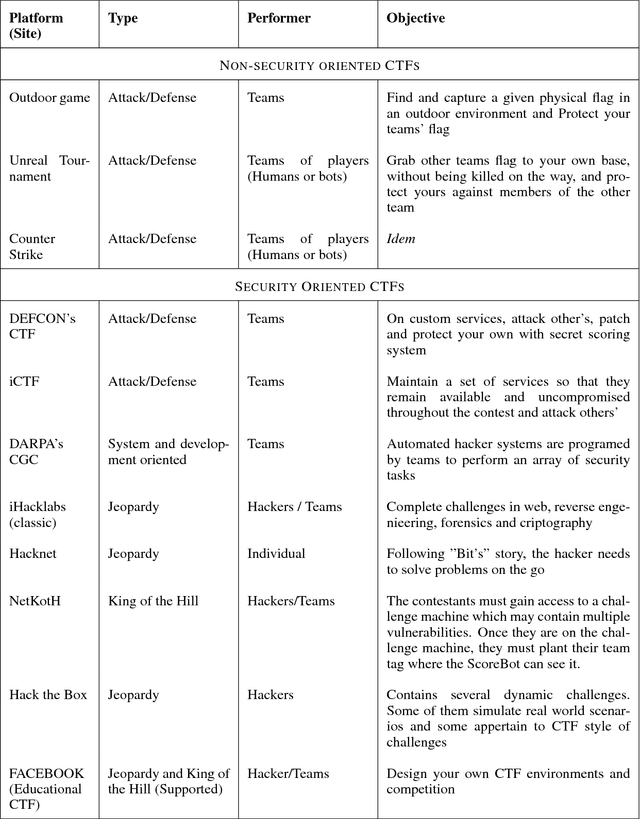
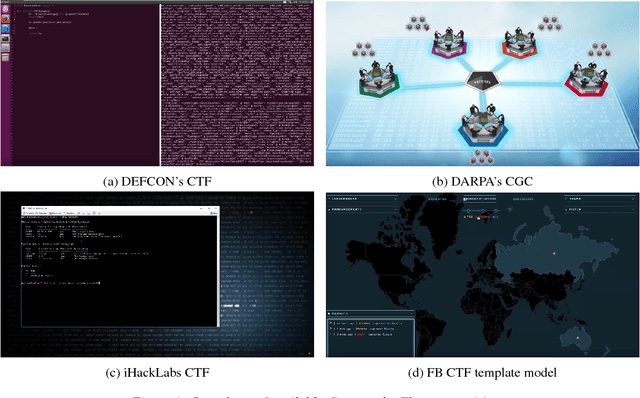
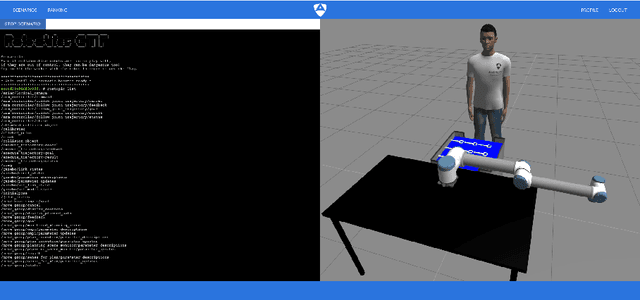
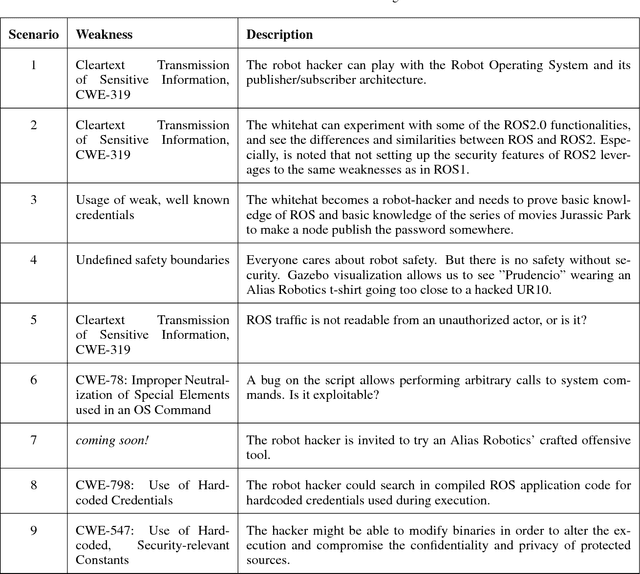
Robots state of insecurity is onstage. There is an emerging concern about major robot vulnerabilities and their adverse consequences. However, there is still a considerable gap between robotics and cybersecurity domains. For the purpose of filling that gap, the present technical report presents the Robotics CTF (RCTF), an online playground to challenge robot security from any browser. We describe the architecture of the RCTF and provide 9 scenarios where hackers can challenge the security of different robotic setups. Our work empowers security researchers to a) reproduce virtual robotic scenarios locally and b) change the networking setup to mimic real robot targets. We advocate for hacker powered security in robotics and contribute by open sourcing our scenarios.
Time Synchronization in modular collaborative robots
Sep 19, 2018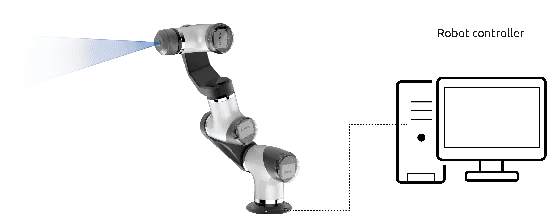
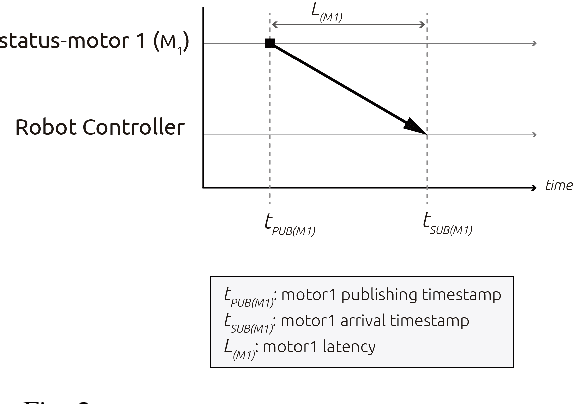
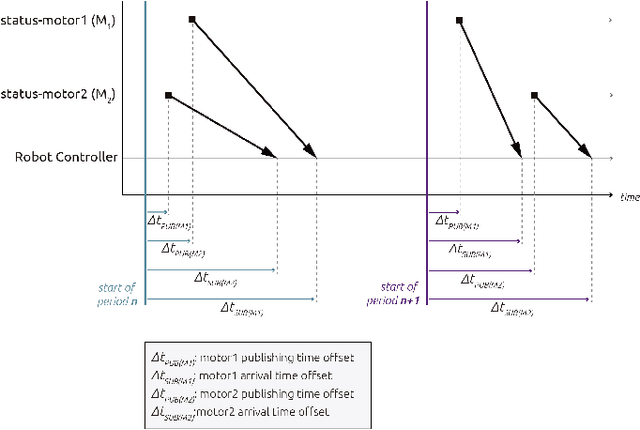
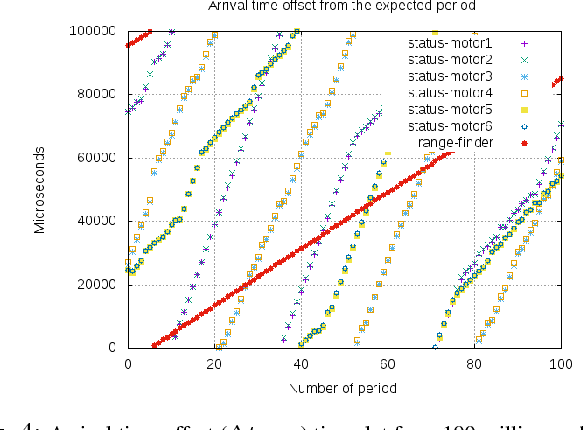
A new generation of robot systems which are modular, flexible and safe for human-robot interaction are needed. Existing cobots seem to meet only the later and require a modular approach to improve their reconfigurability and interoperability. We propose a new sub-class of cobots named M-cobots which tackle these problems. In particular, we discuss the relevance of synchronization for these systems, analyze it and demonstrate how with a properly configured M-cobot, we are able to obtain a) distributed sub-microsecond clock synchronization accuracy among modules, b) timestamping accuracy of ROS 2.0 messages under 100 microseconds and c) millisecond-level end-to-end communication latencies, even when disturbed with networking overloads of up to 90% of the network capacity.
Time-Sensitive Networking for robotics
Sep 11, 2018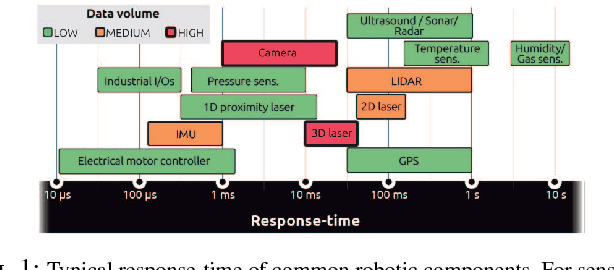
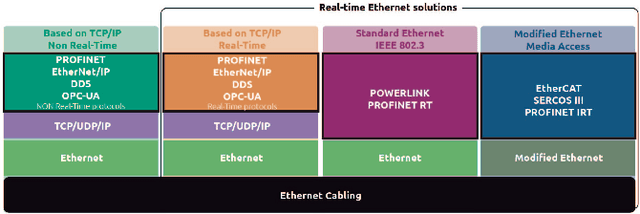
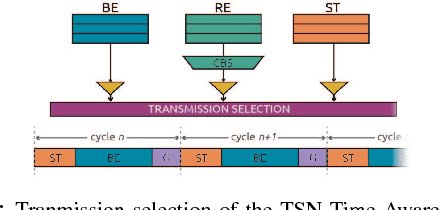
We argue that Time-Sensitive Networking (TSN) will become the de facto standard for real-time communications in robotics. We present a review and classification of the different communication standards which are relevant for the field and introduce the typical problems with traditional switched Ethernet networks. We discuss some of the TSN features relevant for deterministic communications and evaluate experimentally one of the shaping mechanisms in an exemplary robotic scenario. In particular, and based on our results, we claim that many of the existing real-time industrial solutions will slowly be replaced by TSN. And that this will lead towards a unified landscape of physically interoperable robot and robot components.
Towards a distributed and real-time framework for robots: Evaluation of ROS 2.0 communications for real-time robotic applications
Sep 07, 2018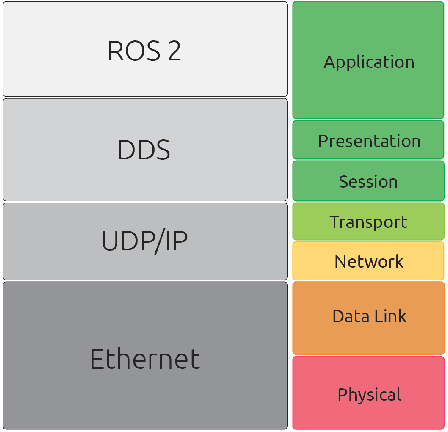
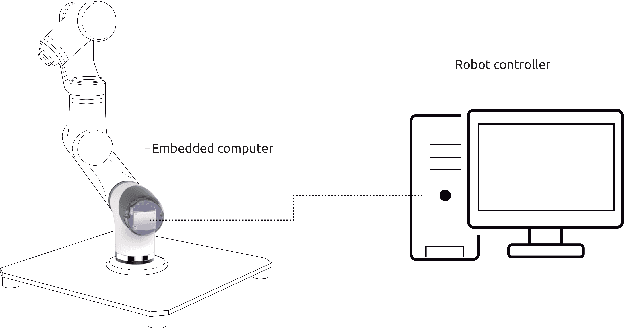
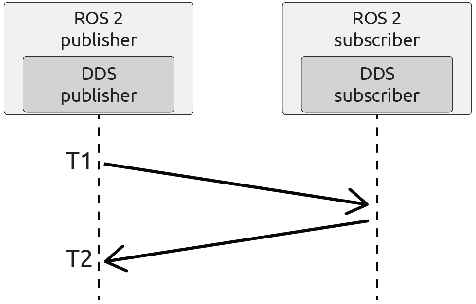
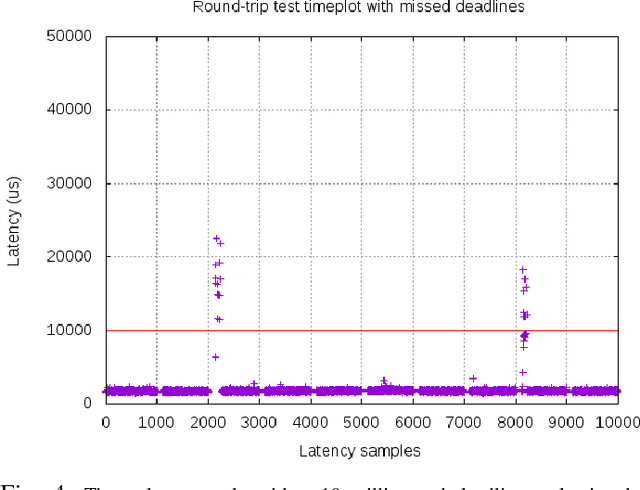
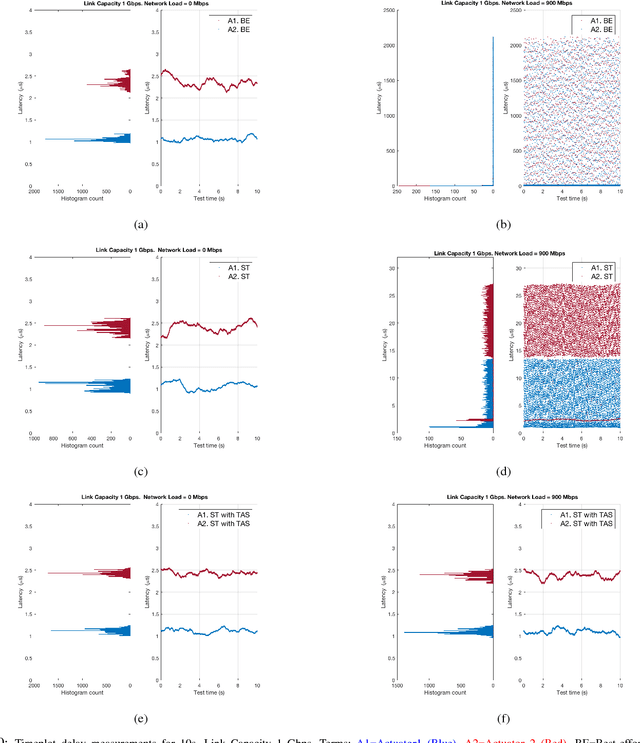
In this work we present an experimental setup to show the suitability of ROS 2.0 for real-time robotic applications. We disclose an evaluation of ROS 2.0 communications in a robotic inter-component (hardware) communication case on top of Linux. We benchmark and study the worst case latencies and missed deadlines to characterize ROS 2.0 communications for real-time applications. We demonstrate experimentally how computation and network congestion impacts the communication latencies and ultimately, propose a setup that, under certain conditions, mitigates these delays and obtains bounded traffic.
Robot_gym: accelerated robot training through simulation in the cloud with ROS and Gazebo
Aug 30, 2018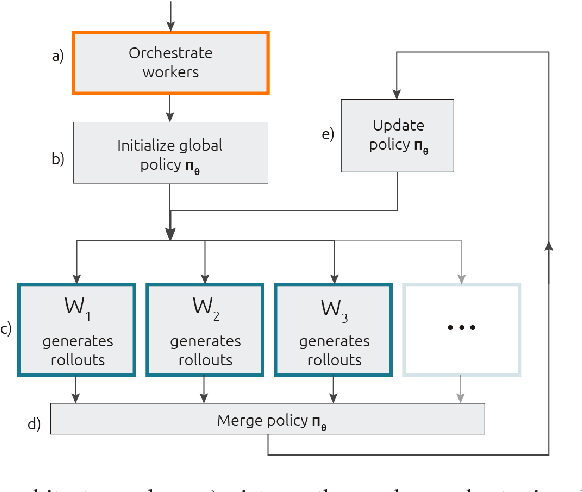

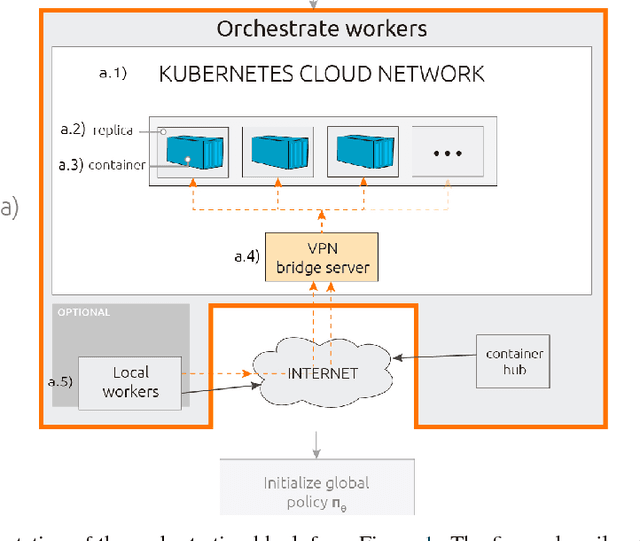
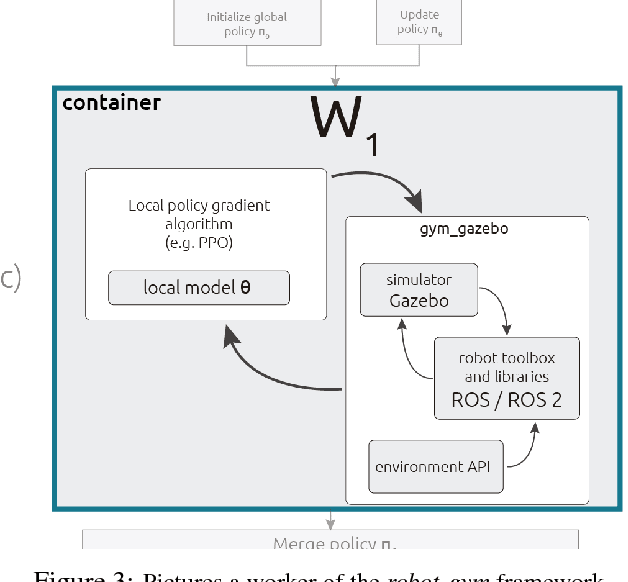
Rather than programming, training allows robots to achieve behaviors that generalize better and are capable to respond to real-world needs. However, such training requires a big amount of experimentation which is not always feasible for a physical robot. In this work, we present robot_gym, a framework to accelerate robot training through simulation in the cloud that makes use of roboticists' tools, simplifying the development and deployment processes on real robots. We unveil that, for simple tasks, simple 3DoF robots require more than 140 attempts to learn. For more complex, 6DoF robots, the number of attempts increases to more than 900 for the same task. We demonstrate that our framework, for simple tasks, accelerates the robot training time by more than 33% while maintaining similar levels of accuracy and repeatability.
Towards an open standard for assessing the severity of robot security vulnerabilities, the Robot Vulnerability Scoring System
Jul 26, 2018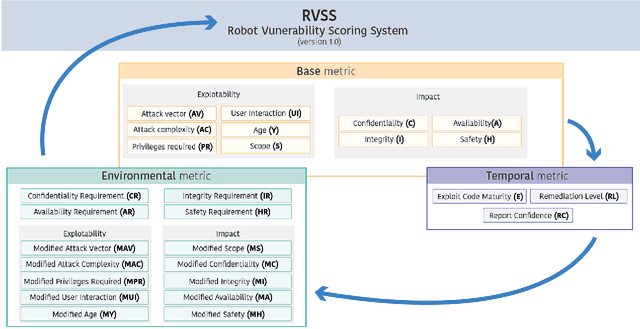
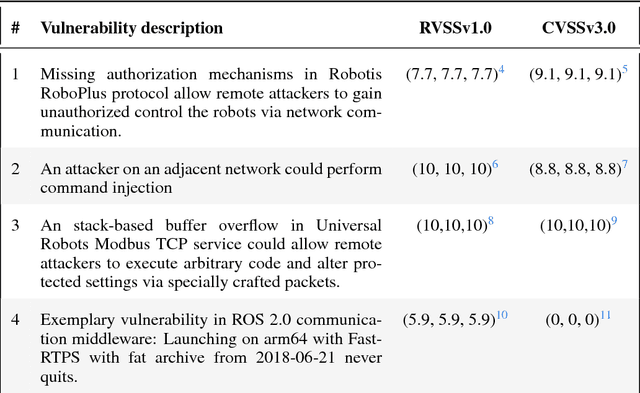
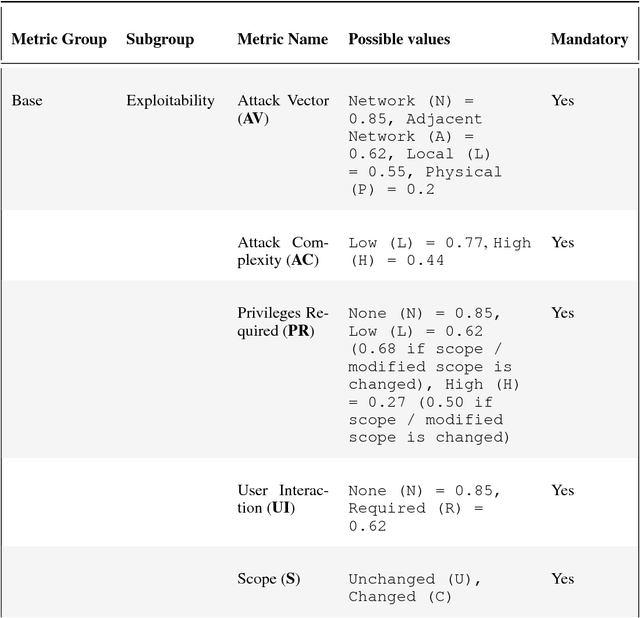
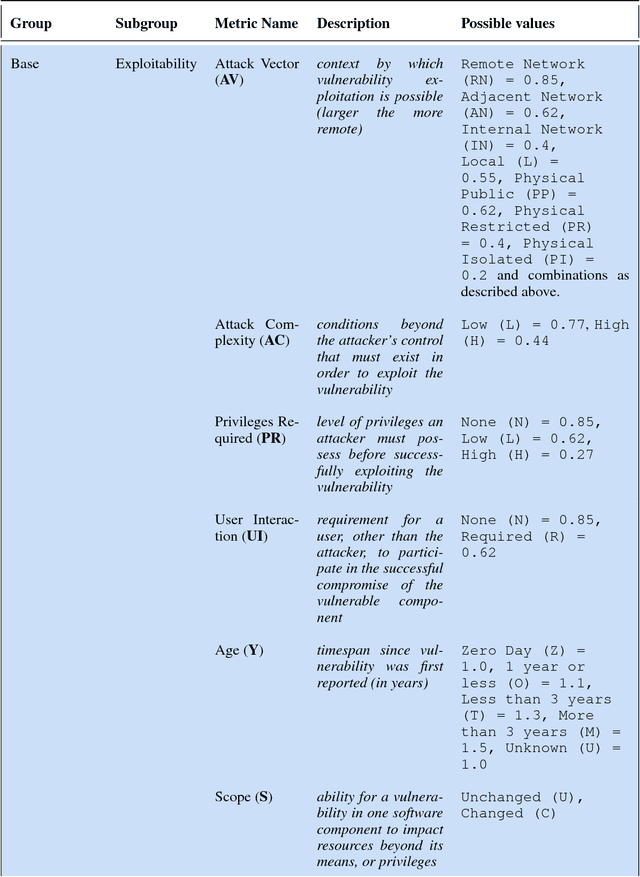
Robots are typically not created with security as a main concern. Contrasting to typical IT systems, cyberphysical systems rely on security to handle safety aspects. In light of the former, classic scoring methods such as the Common Vulnerability Scoring System (CVSS) are not able to accurately capture the severity of robot vulnerabilities. The present research work focuses upon creating an open and free to access Robot Vulnerability Scoring System (RVSS) that considers major relevant issues in robotics including a) robot safety aspects, b) assessment of downstream implications of a given vulnerability, c) library and third-party scoring assessments and d) environmental variables, such as time since vulnerability disclosure or exposure on the web. Finally, an experimental evaluation of RVSS with contrast to CVSS is provided and discussed with focus on the robotics security landscape.
Robot hazards: from safety to security
Jun 11, 2018
Robotics landscape is experiencing big changes. Robots are spreading and will soon be everywhere. Systems traditionally employed in industry are being replaced by collaborative robots, while more and more professional and consumer robots are introduced in people's daily activities. Robots are increasingly intertwined with other facets of IT and envisioned to get much more autonomy, interacting physically with humans. We claim that, following Personal Computers (PCs) and smartphones, robots are the next technological revolution and yet, robot security is being ignored by manufacturers. The present paper aims to alert about the need of dealing not only with safety but with robot security from the very beginning of the forthcoming technological era. We provide herein a document that reviews robot hazards and analyzes the consequences of not facing these issues. We advocate strongly for a security-first approach as a must to be implemented now.
Introducing the Robot Security Framework (RSF), a standardized methodology to perform security assessments in robotics
Jun 11, 2018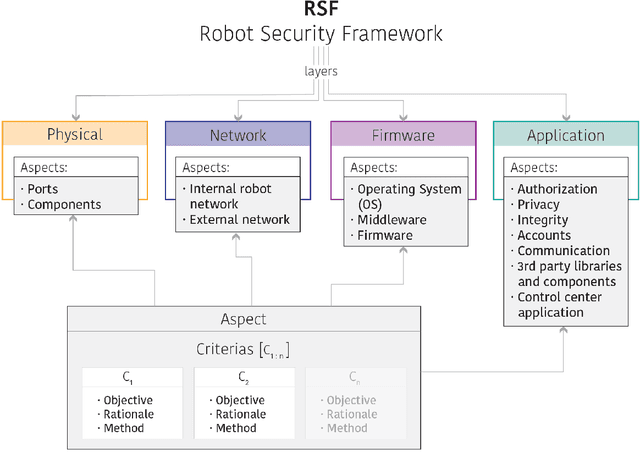
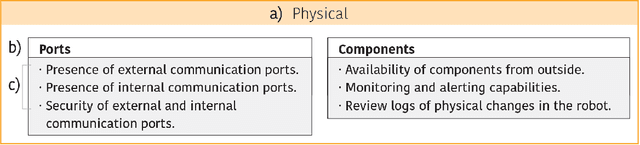
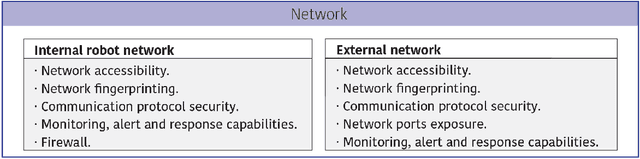

Robots have gained relevance in society, increasingly performing critical tasks. Nonetheless, robot security is being underestimated. Robotics security is a complex landscape, which often requires a cross-disciplinar perspective to which classical security lags behind. To address this issue, we present the Robot Security Framework (RSF), a methodology to perform systematic security assessments in robots. We propose, adapt and develop specific terminology and provide guidelines to enable a holistic security assessment following four main layers (Physical, Network, Firmware and Application). We argue that modern robotics should regard as equally relevant internal and external communication security. Finally, we advocate against "security by obscurity". We conclude that the field of security in robotics deserves further research efforts.