 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime Synchronization in modular collaborative robots
Sep 19, 2018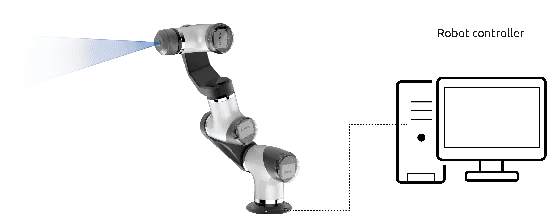
A new generation of robot systems which are modular, flexible and safe for human-robot interaction are needed. Existing cobots seem to meet only the later and require a modular approach to improve their reconfigurability and interoperability. We propose a new sub-class of cobots named M-cobots which tackle these problems. In particular, we discuss the relevance of synchronization for these systems, analyze it and demonstrate how with a properly configured M-cobot, we are able to obtain a) distributed sub-microsecond clock synchronization accuracy among modules, b) timestamping accuracy of ROS 2.0 messages under 100 microseconds and c) millisecond-level end-to-end communication latencies, even when disturbed with networking overloads of up to 90% of the network capacity.
Time-Sensitive Networking for robotics
Sep 11, 2018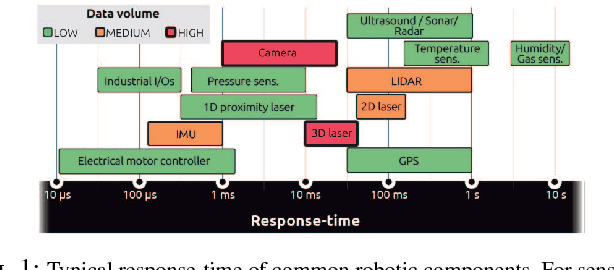
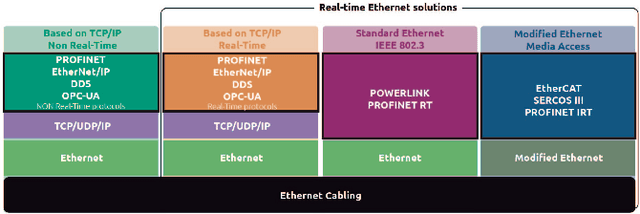
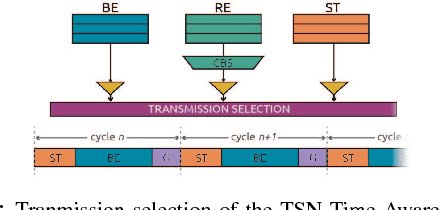
We argue that Time-Sensitive Networking (TSN) will become the de facto standard for real-time communications in robotics. We present a review and classification of the different communication standards which are relevant for the field and introduce the typical problems with traditional switched Ethernet networks. We discuss some of the TSN features relevant for deterministic communications and evaluate experimentally one of the shaping mechanisms in an exemplary robotic scenario. In particular, and based on our results, we claim that many of the existing real-time industrial solutions will slowly be replaced by TSN. And that this will lead towards a unified landscape of physically interoperable robot and robot components.
Towards a distributed and real-time framework for robots: Evaluation of ROS 2.0 communications for real-time robotic applications
Sep 07, 2018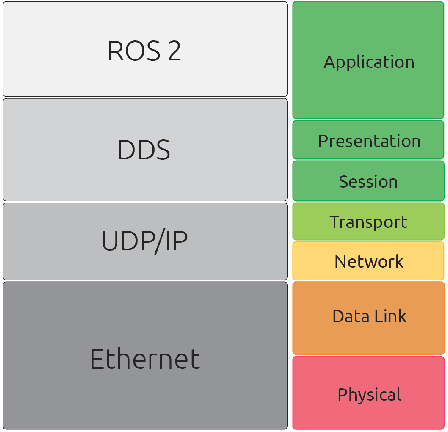
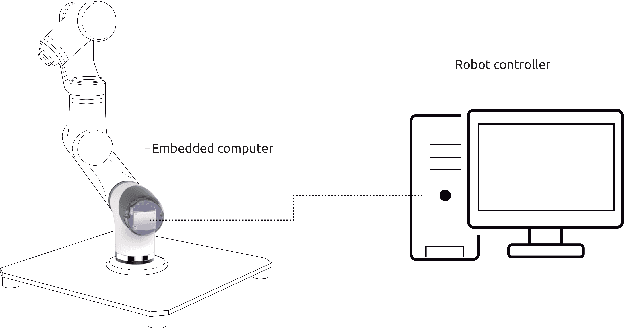
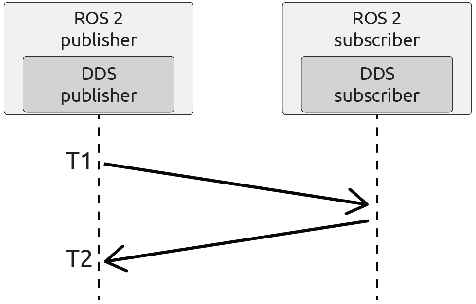
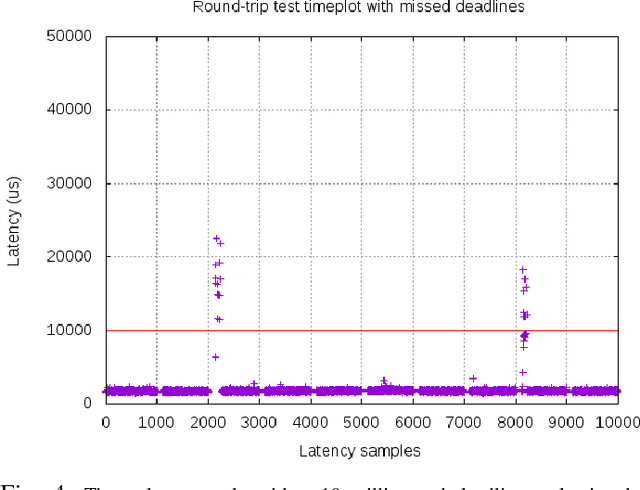
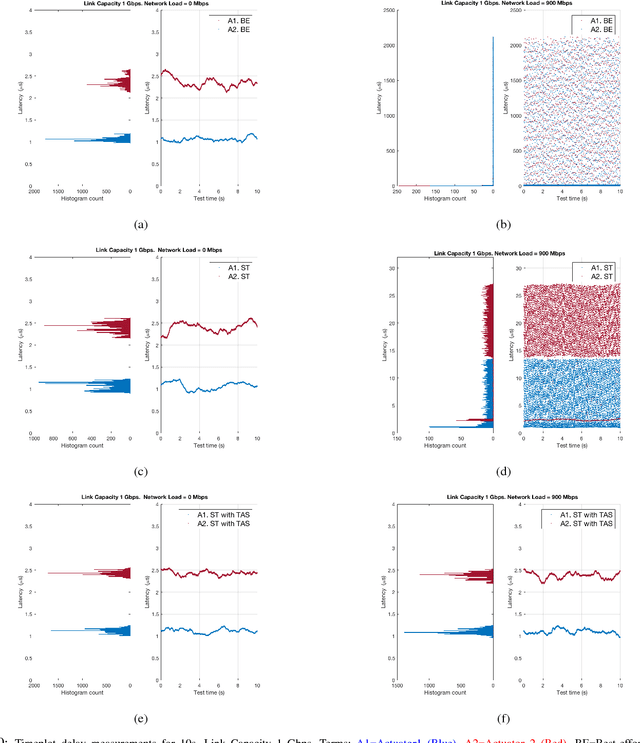
In this work we present an experimental setup to show the suitability of ROS 2.0 for real-time robotic applications. We disclose an evaluation of ROS 2.0 communications in a robotic inter-component (hardware) communication case on top of Linux. We benchmark and study the worst case latencies and missed deadlines to characterize ROS 2.0 communications for real-time applications. We demonstrate experimentally how computation and network congestion impacts the communication latencies and ultimately, propose a setup that, under certain conditions, mitigates these delays and obtains bounded traffic.