 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
A Holistic Approach to Undesired Content Detection in the Real World
Aug 05, 2022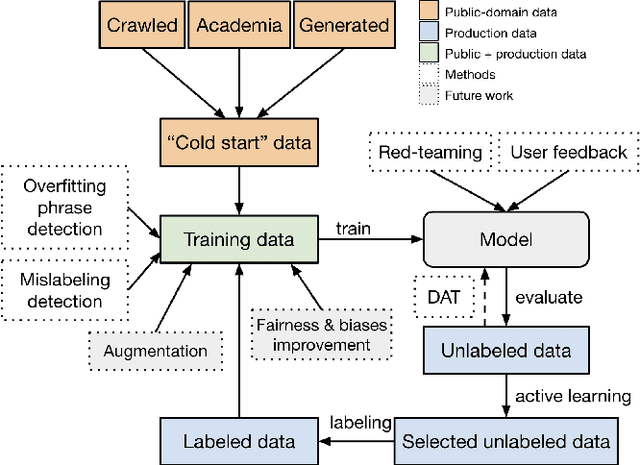
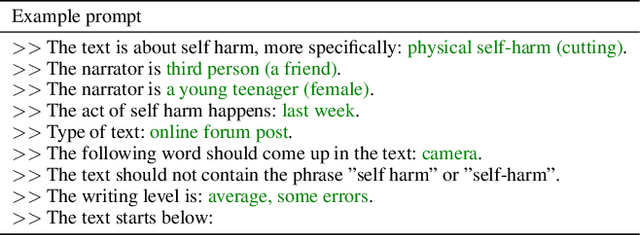

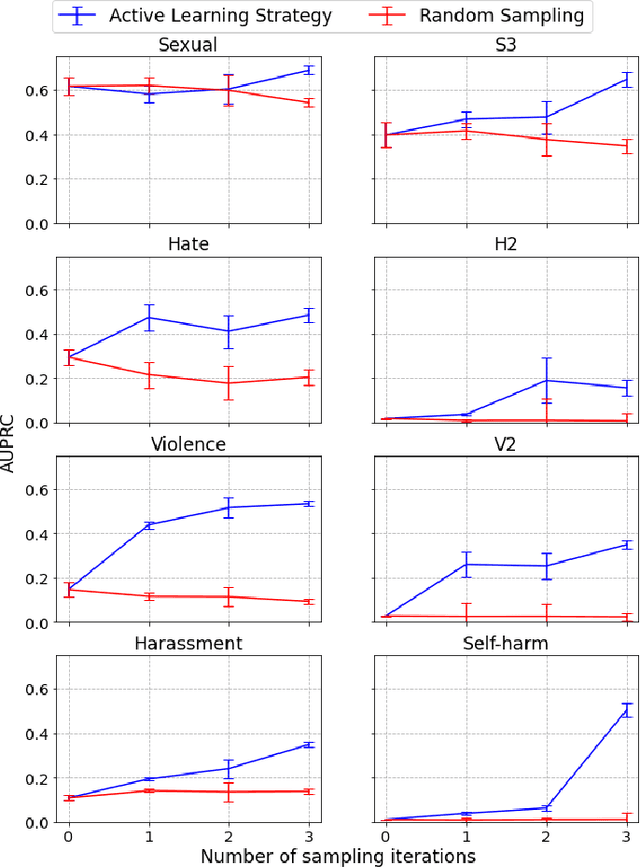
We present a holistic approach to building a robust and useful natural language classification system for real-world content moderation. The success of such a system relies on a chain of carefully designed and executed steps, including the design of content taxonomies and labeling instructions, data quality control, an active learning pipeline to capture rare events, and a variety of methods to make the model robust and to avoid overfitting. Our moderation system is trained to detect a broad set of categories of undesired content, including sexual content, hateful content, violence, self-harm, and harassment. This approach generalizes to a wide range of different content taxonomies and can be used to create high-quality content classifiers that outperform off-the-shelf models.
Emergent Tool Use From Multi-Agent Autocurricula
Sep 17, 2019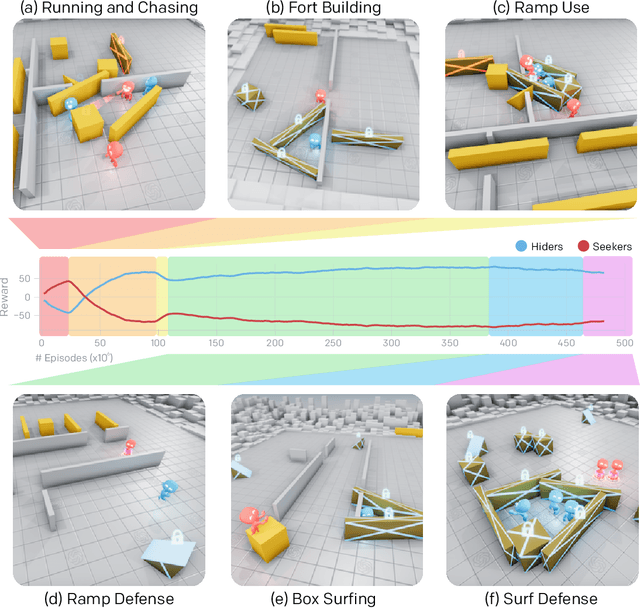
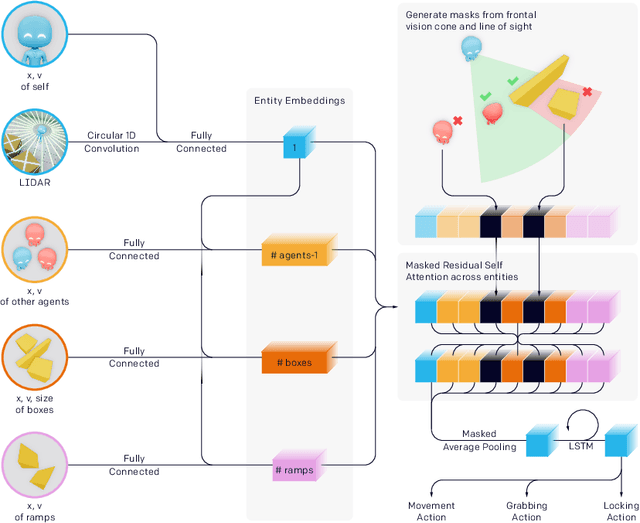
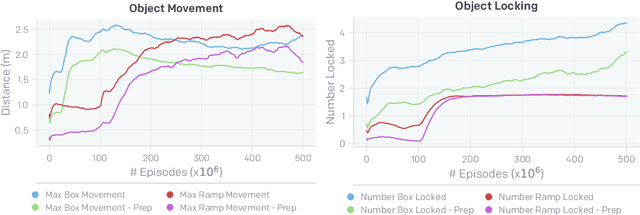
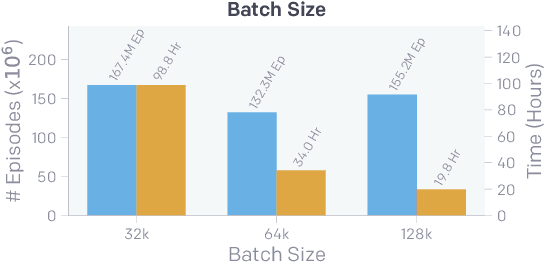
Through multi-agent competition, the simple objective of hide-and-seek, and standard reinforcement learning algorithms at scale, we find that agents create a self-supervised autocurriculum inducing multiple distinct rounds of emergent strategy, many of which require sophisticated tool use and coordination. We find clear evidence of six emergent phases in agent strategy in our environment, each of which creates a new pressure for the opposing team to adapt; for instance, agents learn to build multi-object shelters using moveable boxes which in turn leads to agents discovering that they can overcome obstacles using ramps. We further provide evidence that multi-agent competition may scale better with increasing environment complexity and leads to behavior that centers around far more human-relevant skills than other self-supervised reinforcement learning methods such as intrinsic motivation. Finally, we propose transfer and fine-tuning as a way to quantitatively evaluate targeted capabilities, and we compare hide-and-seek agents to both intrinsic motivation and random initialization baselines in a suite of domain-specific intelligence tests.
Best arm identification in multi-armed bandits with delayed feedback
Mar 29, 2018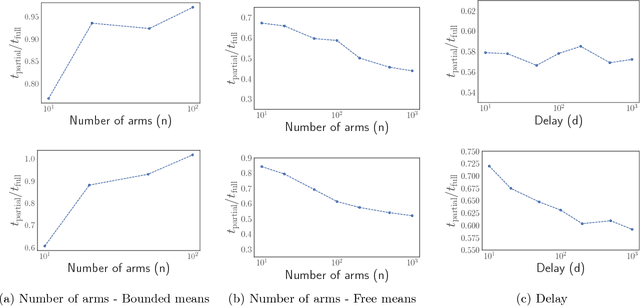
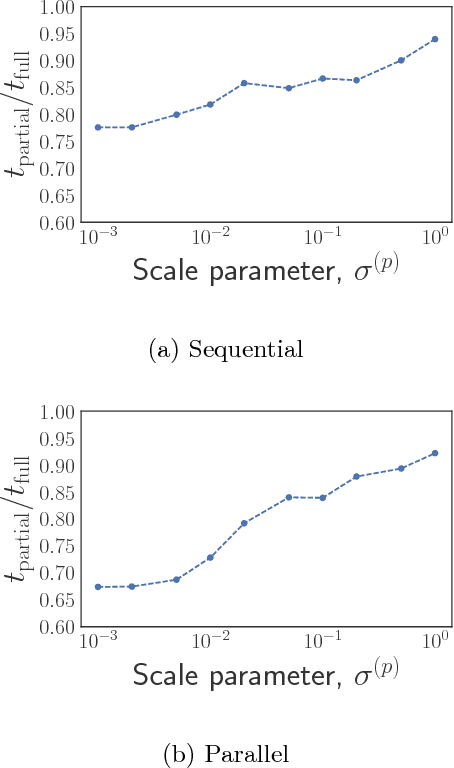
We propose a generalization of the best arm identification problem in stochastic multi-armed bandits (MAB) to the setting where every pull of an arm is associated with delayed feedback. The delay in feedback increases the effective sample complexity of standard algorithms, but can be offset if we have access to partial feedback received before a pull is completed. We propose a general framework to model the relationship between partial and delayed feedback, and as a special case we introduce efficient algorithms for settings where the partial feedback are biased or unbiased estimators of the delayed feedback. Additionally, we propose a novel extension of the algorithms to the parallel MAB setting where an agent can control a batch of arms. Our experiments in real-world settings, involving policy search and hyperparameter optimization in computational sustainability domains for fast charging of batteries and wildlife corridor construction, demonstrate that exploiting the structure of partial feedback can lead to significant improvements over baselines in both sequential and parallel MAB.