 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Pick and Place Detection by Combining SE(3) Diffusion Models with Differential Kinematics
Apr 28, 2025Grasp detection methods typically target the detection of a set of free-floating hand poses that can grasp the object. However, not all of the detected grasp poses are executable due to physical constraints. Even though it is straightforward to filter invalid grasp poses in the post-process, such a two-staged approach is computationally inefficient, especially when the constraint is hard. In this work, we propose an approach to take the following two constraints into account during the grasp detection stage, namely, (i) the picked object must be able to be placed with a predefined configuration without in-hand manipulation (ii) it must be reachable by the robot under the joint limit and collision-avoidance constraints for both pick and place cases. Our key idea is to train an SE(3) grasp diffusion network to estimate the noise in the form of spatial velocity, and constrain the denoising process by a multi-target differential inverse kinematics with an inequality constraint, so that the states are guaranteed to be reachable and placement can be performed without collision. In addition to an improved success ratio, we experimentally confirmed that our approach is more efficient and consistent in computation time compared to a naive two-stage approach.
A Planar-Symmetric SO(3) Representation for Learning Grasp Detection
Oct 07, 2024Planar-symmetric hands, such as parallel grippers, are widely adopted in both research and industrial fields. Their symmetry, however, introduces ambiguity and discontinuity in the SO(3) representation, which hinders both the training and inference of neural-network-based grasp detectors. We propose a novel SO(3) representation that can parametrize a pair of planar-symmetric poses with a single parameter set by leveraging the 2D Bingham distribution. We also detail a grasp detector based on our representation, which provides a more consistent rotation output. An intensive evaluation with multiple grippers and objects in both the simulation and the real world quantitatively shows our approach's contribution.
DiffusionNOCS: Managing Symmetry and Uncertainty in Sim2Real Multi-Modal Category-level Pose Estimation
Feb 20, 2024



This paper addresses the challenging problem of category-level pose estimation. Current state-of-the-art methods for this task face challenges when dealing with symmetric objects and when attempting to generalize to new environments solely through synthetic data training. In this work, we address these challenges by proposing a probabilistic model that relies on diffusion to estimate dense canonical maps crucial for recovering partial object shapes as well as establishing correspondences essential for pose estimation. Furthermore, we introduce critical components to enhance performance by leveraging the strength of the diffusion models with multi-modal input representations. We demonstrate the effectiveness of our method by testing it on a range of real datasets. Despite being trained solely on our generated synthetic data, our approach achieves state-of-the-art performance and unprecedented generalization qualities, outperforming baselines, even those specifically trained on the target domain.
Gravity-aware Grasp Generation with Implicit Grasp Mode Selection for Underactuated Hands
Dec 19, 2023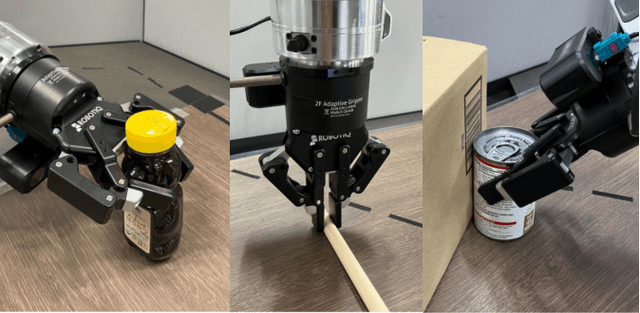
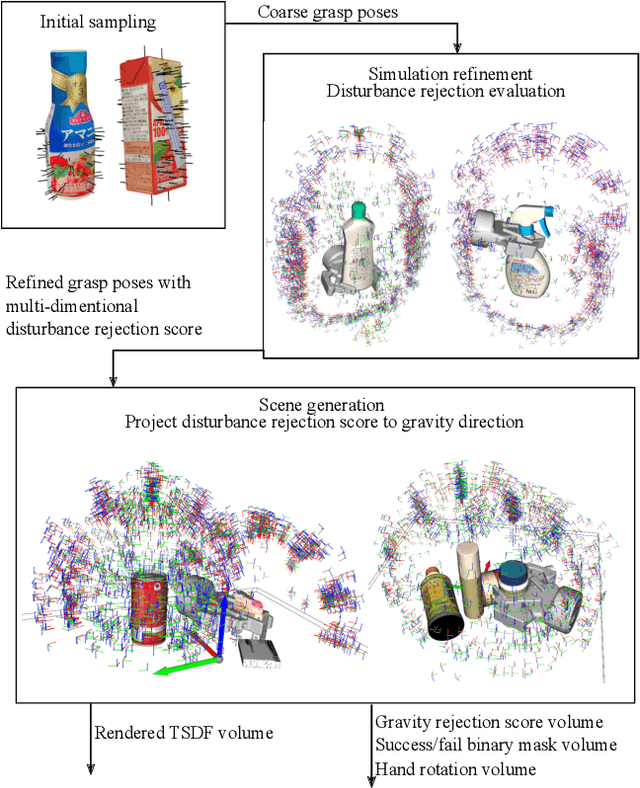
To overcome the mechanical limitation of parallel-jaw grippers, in this paper, we present a gravity-aware grasp generation that supports both precision grasp and power grasp of underactuated hands. We propose a novel approach to generate a large-scale dataset with a gravity-rejection score and experimentally confirm that the combination of that score and classical success/fail binary classification is powerful: the former encourages stable grasps, such as power grasps or grasping the center of mass, while the latter rejects invalid grasps, such as colliding with other objects or attempting to grasp parts that are too large for the gripper. We also propose a rotation representation that is continuous on SO(3) and considers the grasp's physical meaning. Our simulation and real robot evaluation experiments demonstrate significant improvements from the baseline works, especially for heavy objects.
Development of a Stereo-Vision Based High-Throughput Robotic System for Mouse Tail Vein Injection
May 25, 2022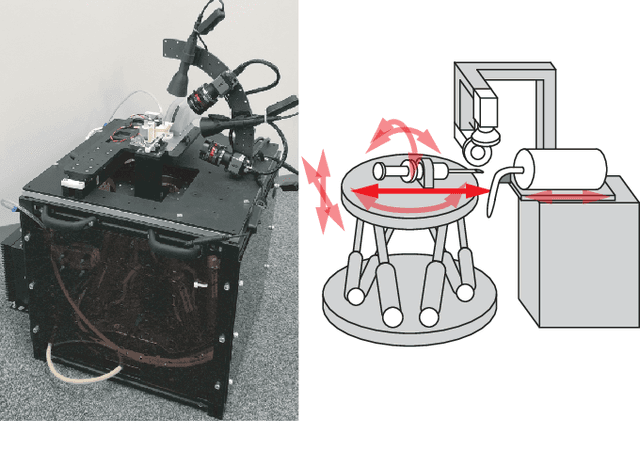
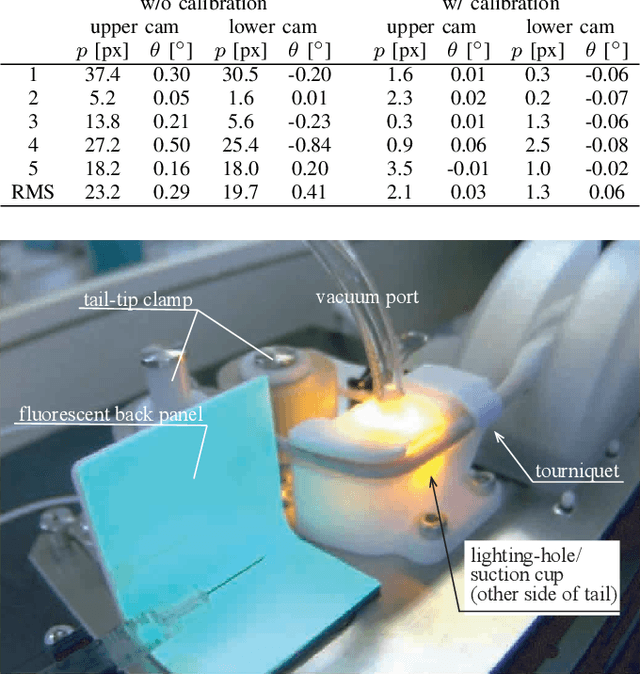
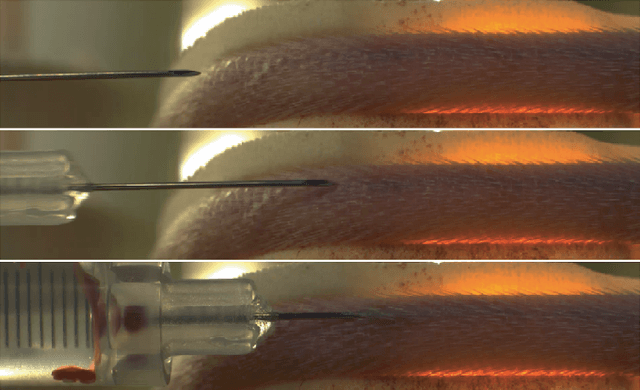

In this paper, we present a robotic device for mouse tail vein injection. We propose a mouse holding mechanism to realize vein injection without anesthetizing the mouse, which consists of a tourniquet, vacuum port, and adaptive tail-end fixture. The position of the target vein in 3D space is reconstructed from a high-resolution stereo vision. The vein is detected by a simple but robust vein line detector. Thanks to the proposed two-staged calibration process, the total time for the injection process is limited to 1.5 minutes, despite that the position of needle and tail vein varies for each trial. We performed an injection experiment targeting 40 mice and succeeded to inject saline to 37 of them, resulting 92.5% success ratio.
A Tendon-driven Robot Gripper with Passively Switchable Underactuated Surface and its Physics Simulation Based Parameter Optimization
Aug 13, 2020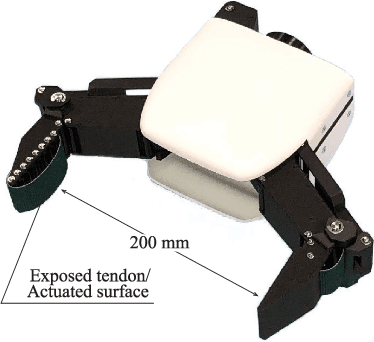


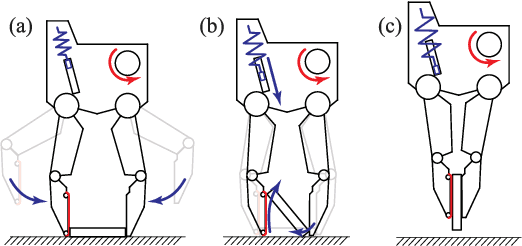
In this paper, we propose a single-actuator gripper that can lift thin objects lying on a flat surface, in addition to the ability as a standard parallel gripper. The key is a crawler on the fingertip, which is underactuated together with other finger joints and switched with a passive and spring-loaded mechanism. While the idea of crawling finger is not a new one, this paper contributes to realize the crawling without additional motor. The gripper can passively change the mode from the parallel approach mode to the pull-in mode, then finally to the power grasp mode, according to the grasping state. To optimize the highly underactuated system, we take a combination of black-box optimization and physics simulation of the whole grasp process. We show that this simulation-based approach can effectively consider the precontact motion, in-hand manipulation, power grasp stability, and even failure mode, which is difficult for the static-equilibrium-analysis-based approaches. In the last part of the paper, we demonstrate that a prototype gripper with the proposed structure and design parameters optimized under the proposed process successfully power-grasped a thin sheet, a softcover book, and a cylinder lying on a flat surface.