 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGravity-aware Grasp Generation with Implicit Grasp Mode Selection for Underactuated Hands
Dec 19, 2023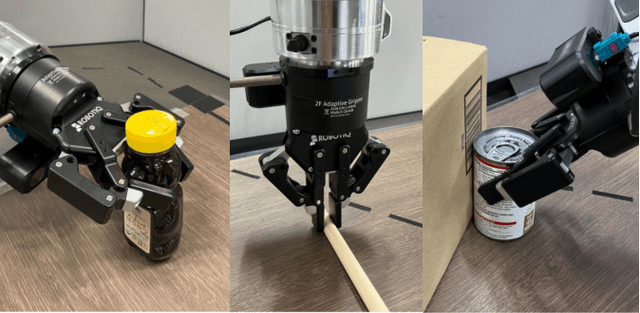
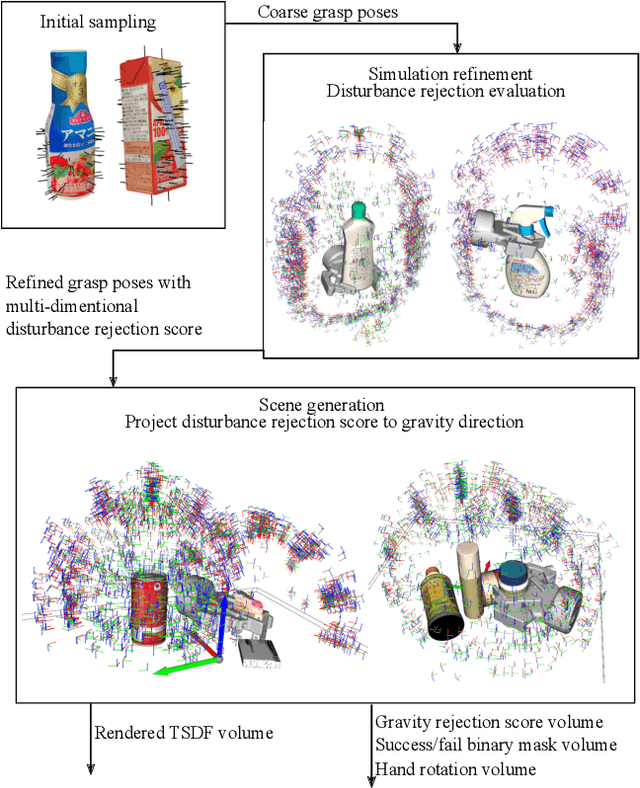
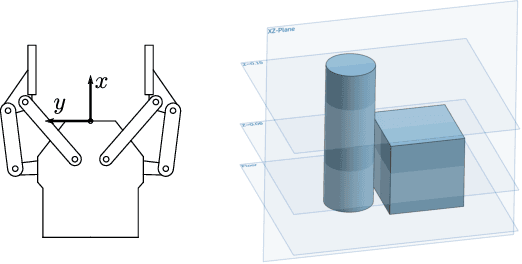
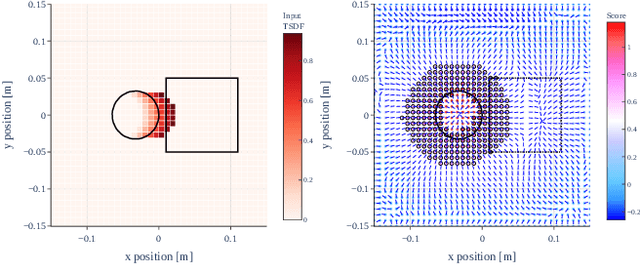
To overcome the mechanical limitation of parallel-jaw grippers, in this paper, we present a gravity-aware grasp generation that supports both precision grasp and power grasp of underactuated hands. We propose a novel approach to generate a large-scale dataset with a gravity-rejection score and experimentally confirm that the combination of that score and classical success/fail binary classification is powerful: the former encourages stable grasps, such as power grasps or grasping the center of mass, while the latter rejects invalid grasps, such as colliding with other objects or attempting to grasp parts that are too large for the gripper. We also propose a rotation representation that is continuous on SO(3) and considers the grasp's physical meaning. Our simulation and real robot evaluation experiments demonstrate significant improvements from the baseline works, especially for heavy objects.