 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext-free Self-Conditioned GAN for Trajectory Forecasting
Mar 09, 2026In this paper, we present a context-free unsupervised approach based on a self-conditioned GAN to learn different modes from 2D trajectories. Our intuition is that each mode indicates a different behavioral moving pattern in the discriminator's feature space. We apply this approach to the problem of trajectory forecasting. We present three different training settings based on self-conditioned GAN, which produce better forecasters. We test our method in two data sets: human motion and road agents. Experimental results show that our approach outperforms previous context-free methods in the least representative supervised labels while performing well in the remaining labels. In addition, our approach outperforms globally in human motion, while performing well in road agents.
THÖR-MAGNI Act: Actions for Human Motion Modeling in Robot-Shared Industrial Spaces
Dec 18, 2024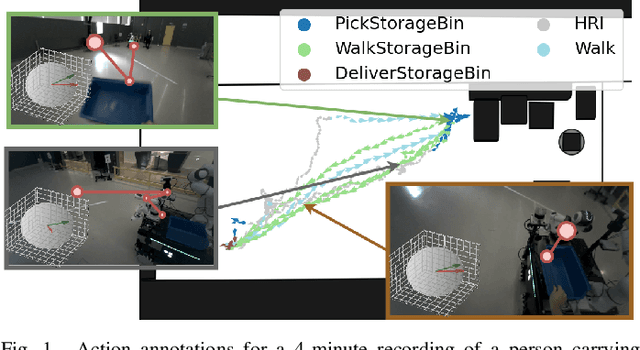
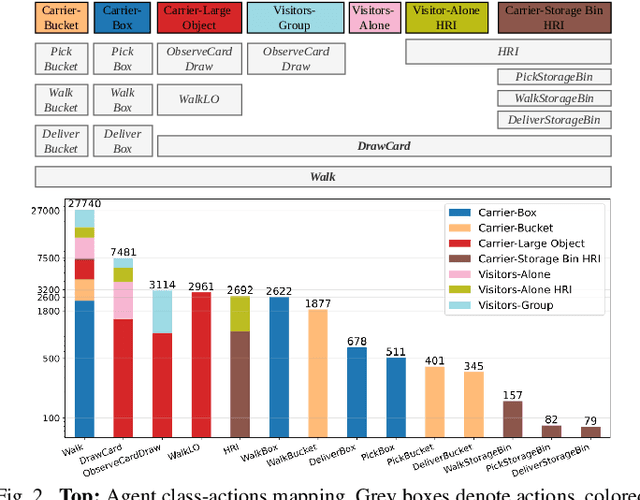
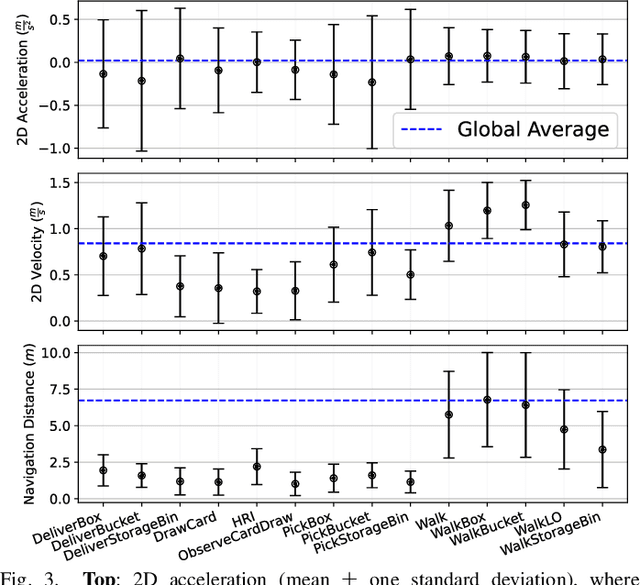
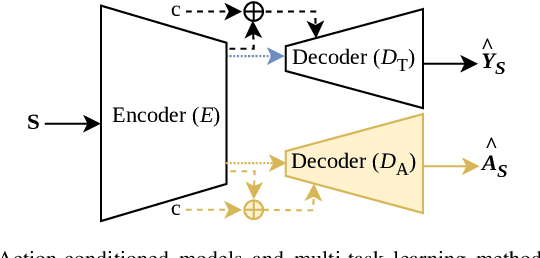
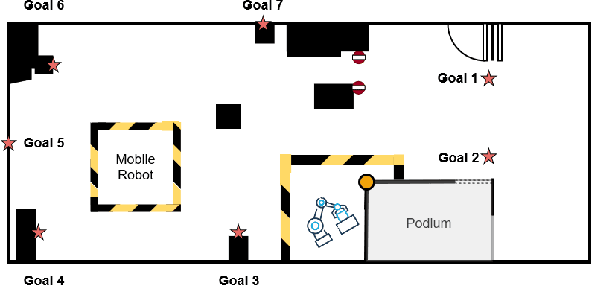
Accurate human activity and trajectory prediction are crucial for ensuring safe and reliable human-robot interactions in dynamic environments, such as industrial settings, with mobile robots. Datasets with fine-grained action labels for moving people in industrial environments with mobile robots are scarce, as most existing datasets focus on social navigation in public spaces. This paper introduces the TH\"OR-MAGNI Act dataset, a substantial extension of the TH\"OR-MAGNI dataset, which captures participant movements alongside robots in diverse semantic and spatial contexts. TH\"OR-MAGNI Act provides 8.3 hours of manually labeled participant actions derived from egocentric videos recorded via eye-tracking glasses. These actions, aligned with the provided TH\"OR-MAGNI motion cues, follow a long-tailed distribution with diversified acceleration, velocity, and navigation distance profiles. We demonstrate the utility of TH\"OR-MAGNI Act for two tasks: action-conditioned trajectory prediction and joint action and trajectory prediction. We propose two efficient transformer-based models that outperform the baselines to address these tasks. These results underscore the potential of TH\"OR-MAGNI Act to develop predictive models for enhanced human-robot interaction in complex environments.
THÖR-MAGNI: A Large-scale Indoor Motion Capture Recording of Human Movement and Robot Interaction
Mar 14, 2024



We present a new large dataset of indoor human and robot navigation and interaction, called TH\"OR-MAGNI, that is designed to facilitate research on social navigation: e.g., modelling and predicting human motion, analyzing goal-oriented interactions between humans and robots, and investigating visual attention in a social interaction context. TH\"OR-MAGNI was created to fill a gap in available datasets for human motion analysis and HRI. This gap is characterized by a lack of comprehensive inclusion of exogenous factors and essential target agent cues, which hinders the development of robust models capable of capturing the relationship between contextual cues and human behavior in different scenarios. Unlike existing datasets, TH\"OR-MAGNI includes a broader set of contextual features and offers multiple scenario variations to facilitate factor isolation. The dataset includes many social human-human and human-robot interaction scenarios, rich context annotations, and multi-modal data, such as walking trajectories, gaze tracking data, and lidar and camera streams recorded from a mobile robot. We also provide a set of tools for visualization and processing of the recorded data. TH\"OR-MAGNI is, to the best of our knowledge, unique in the amount and diversity of sensor data collected in a contextualized and socially dynamic environment, capturing natural human-robot interactions.
Likely, Light, and Accurate Context-Free Clusters-based Trajectory Prediction
Jul 27, 2023



Autonomous systems in the road transportation network require intelligent mechanisms that cope with uncertainty to foresee the future. In this paper, we propose a multi-stage probabilistic approach for trajectory forecasting: trajectory transformation to displacement space, clustering of displacement time series, trajectory proposals, and ranking proposals. We introduce a new deep feature clustering method, underlying self-conditioned GAN, which copes better with distribution shifts than traditional methods. Additionally, we propose novel distance-based ranking proposals to assign probabilities to the generated trajectories that are more efficient yet accurate than an auxiliary neural network. The overall system surpasses context-free deep generative models in human and road agents trajectory data while performing similarly to point estimators when comparing the most probable trajectory.
The Magni Human Motion Dataset: Accurate, Complex, Multi-Modal, Natural, Semantically-Rich and Contextualized
Aug 31, 2022


Rapid development of social robots stimulates active research in human motion modeling, interpretation and prediction, proactive collision avoidance, human-robot interaction and co-habitation in shared spaces. Modern approaches to this end require high quality datasets for training and evaluation. However, the majority of available datasets suffers from either inaccurate tracking data or unnatural, scripted behavior of the tracked people. This paper attempts to fill this gap by providing high quality tracking information from motion capture, eye-gaze trackers and on-board robot sensors in a semantically-rich environment. To induce natural behavior of the recorded participants, we utilise loosely scripted task assignment, which induces the participants navigate through the dynamic laboratory environment in a natural and purposeful way. The motion dataset, presented in this paper, sets a high quality standard, as the realistic and accurate data is enhanced with semantic information, enabling development of new algorithms which rely not only on the tracking information but also on contextual cues of the moving agents, static and dynamic environment.