 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROS2WASM: Bringing the Robot Operating System to the Web
Sep 16, 2024



The Robot Operating System (ROS) has become the de facto standard middleware in robotics, widely adopted across domains ranging from education to industrial applications. The RoboStack distribution has extended ROS's accessibility by facilitating installation across all major operating systems and architectures, integrating seamlessly with scientific tools such as PyTorch and Open3D. This paper presents ROS2WASM, a novel integration of RoboStack with WebAssembly, enabling the execution of ROS 2 and its associated software directly within web browsers, without requiring local installations. This approach significantly enhances reproducibility and shareability of research, lowers barriers to robotics education, and leverages WebAssembly's robust security framework to protect against malicious code. We detail our methodology for cross-compiling ROS 2 packages into WebAssembly, the development of a specialized middleware for ROS 2 communication within browsers, and the implementation of a web platform available at www.ros2wasm.dev that allows users to interact with ROS 2 environments. Additionally, we extend support to the Robotics Toolbox for Python and adapt its Swift simulator for browser compatibility. Our work paves the way for unprecedented accessibility in robotics, offering scalable, secure, and reproducible environments that have the potential to transform educational and research paradigms.
A Generalized Framework for Agglomerative Clustering of Signed Graphs applied to Instance Segmentation
Jun 27, 2019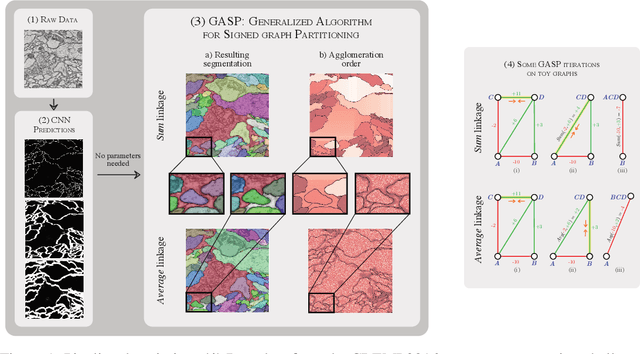
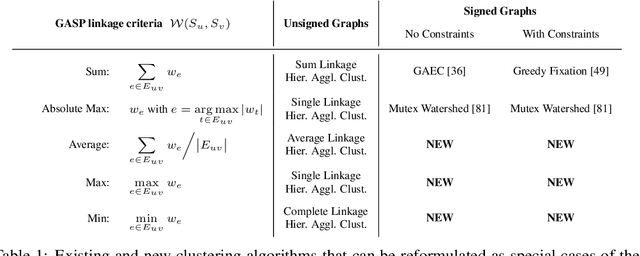
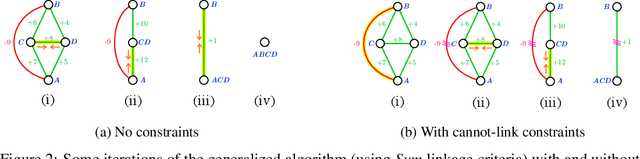
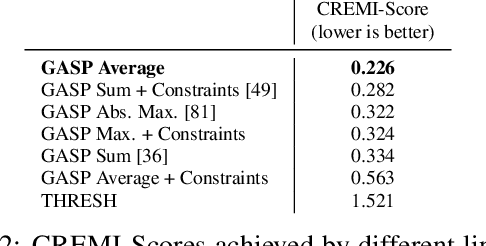
We propose a novel theoretical framework that generalizes algorithms for hierarchical agglomerative clustering to weighted graphs with both attractive and repulsive interactions between the nodes. This framework defines GASP, a Generalized Algorithm for Signed graph Partitioning, and allows us to explore many combinations of different linkage criteria and cannot-link constraints. We prove the equivalence of existing clustering methods to some of those combinations, and introduce new algorithms for combinations which have not been studied. An extensive comparison is performed to evaluate properties of the clustering algorithms in the context of instance segmentation in images, including robustness to noise and efficiency. We show how one of the new algorithms proposed in our framework outperforms all previously known agglomerative methods for signed graphs, both on the competitive CREMI 2016 EM segmentation benchmark and on the CityScapes dataset.
OpenGM: A C++ Library for Discrete Graphical Models
Jun 01, 2012

OpenGM is a C++ template library for defining discrete graphical models and performing inference on these models, using a wide range of state-of-the-art algorithms. No restrictions are imposed on the factor graph to allow for higher-order factors and arbitrary neighborhood structures. Large models with repetitive structure are handled efficiently because (i) functions that occur repeatedly need to be stored only once, and (ii) distinct functions can be implemented differently, using different encodings alongside each other in the same model. Several parametric functions (e.g. metrics), sparse and dense value tables are provided and so is an interface for custom C++ code. Algorithms are separated by design from the representation of graphical models and are easily exchangeable. OpenGM, its algorithms, HDF5 file format and command line tools are modular and extendible.