 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixi: Unified Software Development and Distribution for Robotics and AI
Nov 06, 2025The reproducibility crisis in scientific computing constrains robotics research. Existing studies reveal that up to 70% of robotics algorithms cannot be reproduced by independent teams, while many others fail to reach deployment because creating shareable software environments remains prohibitively complex. These challenges stem from fragmented, multi-language, and hardware-software toolchains that lead to dependency hell. We present Pixi, a unified package-management framework that addresses these issues by capturing exact dependency states in project-level lockfiles, ensuring bit-for-bit reproducibility across platforms. Its high-performance SAT solver achieves up to 10x faster dependency resolution than comparable tools, while integration of the conda-forge and PyPI ecosystems removes the need for multiple managers. Adopted in over 5,300 projects since 2023, Pixi reduces setup times from hours to minutes and lowers technical barriers for researchers worldwide. By enabling scalable, reproducible, collaborative research infrastructure, Pixi accelerates progress in robotics and AI.
ROS2WASM: Bringing the Robot Operating System to the Web
Sep 16, 2024



The Robot Operating System (ROS) has become the de facto standard middleware in robotics, widely adopted across domains ranging from education to industrial applications. The RoboStack distribution has extended ROS's accessibility by facilitating installation across all major operating systems and architectures, integrating seamlessly with scientific tools such as PyTorch and Open3D. This paper presents ROS2WASM, a novel integration of RoboStack with WebAssembly, enabling the execution of ROS 2 and its associated software directly within web browsers, without requiring local installations. This approach significantly enhances reproducibility and shareability of research, lowers barriers to robotics education, and leverages WebAssembly's robust security framework to protect against malicious code. We detail our methodology for cross-compiling ROS 2 packages into WebAssembly, the development of a specialized middleware for ROS 2 communication within browsers, and the implementation of a web platform available at www.ros2wasm.dev that allows users to interact with ROS 2 environments. Additionally, we extend support to the Robotics Toolbox for Python and adapt its Swift simulator for browser compatibility. Our work paves the way for unprecedented accessibility in robotics, offering scalable, secure, and reproducible environments that have the potential to transform educational and research paradigms.
RoboStack: Using the Robot Operating System alongside the Conda and Jupyter Data Science Ecosystems
Apr 26, 2021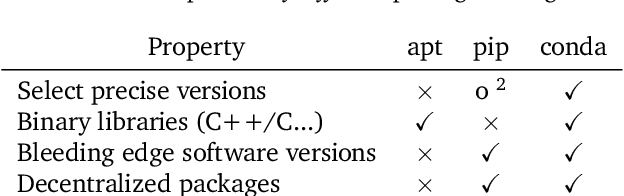
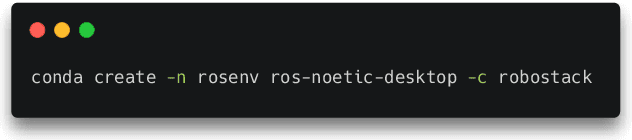
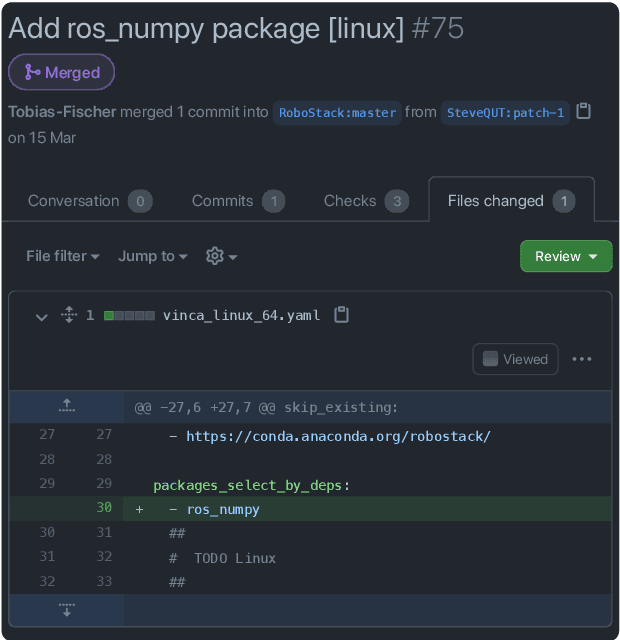
We argue that it is beneficial to tightly couple the widely-used Robot Operating System with Conda, a cross-platform, language-agnostic package manager, and Jupyter, a web-based interactive computational environment affording scientific computing. We provide new ROS packages for Conda, enabling the installation of ROS alongside data-science and machine-learning packages with ease. Multiple ROS versions (currently Melodic, Noetic and ROS2 Foxy) can run simultaneously on one machine, with pre-compiled binaries available for Linux, Windows and OSX, and the ARM architecture (e.g. the Raspberry Pi and the new Apple Silicon). To deal with the large size of the ROS ecosystem, we significantly improved the speed of the Conda solver and build system by rewriting the crucial parts in C++. We further contribute a collection of JupyterLab extensions for ROS, including plugins for live plotting, debugging and robot control, as well as tight integration with Zethus, an RViz like visualization tool. Taken together, RoboStack combines the best of the data-science and robotics worlds to help researchers and developers to build custom solutions for their academic and industrial projects.
Multimodal Probabilistic Model-Based Planning for Human-Robot Interaction
Oct 25, 2017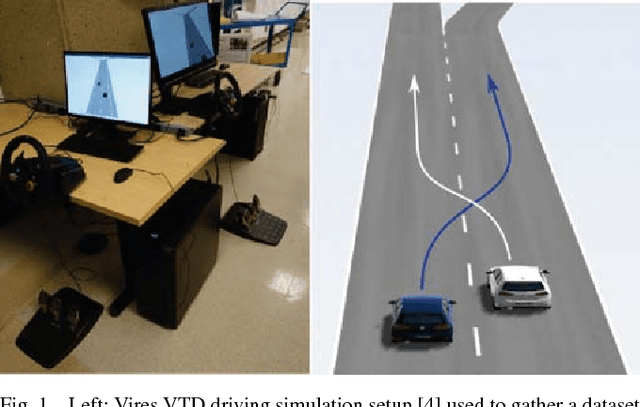
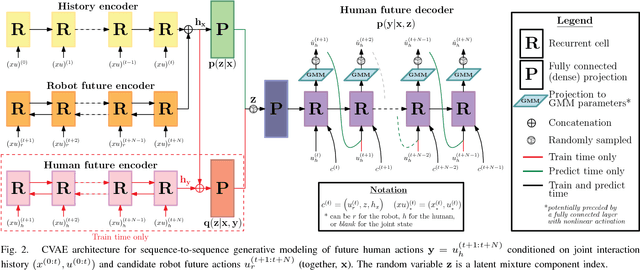
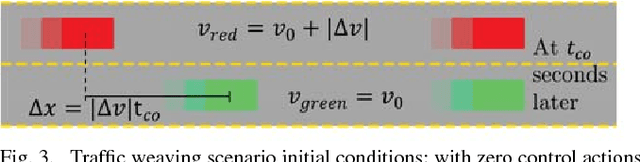
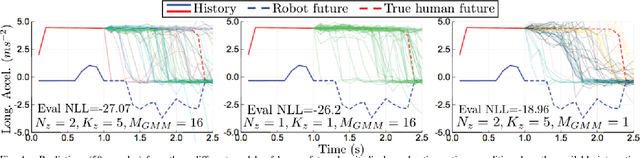
This paper presents a method for constructing human-robot interaction policies in settings where multimodality, i.e., the possibility of multiple highly distinct futures, plays a critical role in decision making. We are motivated in this work by the example of traffic weaving, e.g., at highway on-ramps/off-ramps, where entering and exiting cars must swap lanes in a short distance---a challenging negotiation even for experienced drivers due to the inherent multimodal uncertainty of who will pass whom. Our approach is to learn multimodal probability distributions over future human actions from a dataset of human-human exemplars and perform real-time robot policy construction in the resulting environment model through massively parallel sampling of human responses to candidate robot action sequences. Direct learning of these distributions is made possible by recent advances in the theory of conditional variational autoencoders (CVAEs), whereby we learn action distributions simultaneously conditioned on the present interaction history, as well as candidate future robot actions in order to take into account response dynamics. We demonstrate the efficacy of this approach with a human-in-the-loop simulation of a traffic weaving scenario.