 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROS2WASM: Bringing the Robot Operating System to the Web
Sep 16, 2024



The Robot Operating System (ROS) has become the de facto standard middleware in robotics, widely adopted across domains ranging from education to industrial applications. The RoboStack distribution has extended ROS's accessibility by facilitating installation across all major operating systems and architectures, integrating seamlessly with scientific tools such as PyTorch and Open3D. This paper presents ROS2WASM, a novel integration of RoboStack with WebAssembly, enabling the execution of ROS 2 and its associated software directly within web browsers, without requiring local installations. This approach significantly enhances reproducibility and shareability of research, lowers barriers to robotics education, and leverages WebAssembly's robust security framework to protect against malicious code. We detail our methodology for cross-compiling ROS 2 packages into WebAssembly, the development of a specialized middleware for ROS 2 communication within browsers, and the implementation of a web platform available at www.ros2wasm.dev that allows users to interact with ROS 2 environments. Additionally, we extend support to the Robotics Toolbox for Python and adapt its Swift simulator for browser compatibility. Our work paves the way for unprecedented accessibility in robotics, offering scalable, secure, and reproducible environments that have the potential to transform educational and research paradigms.
Toward Fault Detection in Industrial Welding Processes with Deep Learning and Data Augmentation
Jun 18, 2021
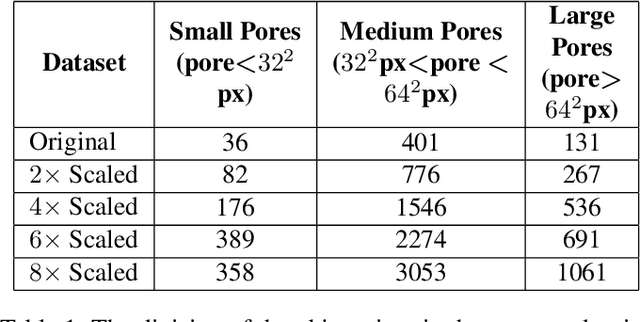


With the rise of deep learning models in the field of computer vision, new possibilities for their application in industrial processes proves to return great benefits. Nevertheless, the actual fit of machine learning for highly standardised industrial processes is still under debate. This paper addresses the challenges on the industrial realization of the AI tools, considering the use case of Laser Beam Welding quality control as an example. We use object detection algorithms from the TensorFlow object detection API and adapt them to our use case using transfer learning. The baseline models we develop are used as benchmarks and evaluated and compared to models that undergo dataset scaling and hyperparameter tuning. We find that moderate scaling of the dataset via image augmentation leads to improvements in intersection over union (IoU) and recall, whereas high levels of augmentation and scaling may lead to deterioration of results. Finally, we put our results into perspective of the underlying use case and evaluate their fit.