 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeNN: A RISC-V vector processor for Spiking Neural Network acceleration
Jun 13, 2025Spiking Neural Networks (SNNs) have the potential to drastically reduce the energy requirements of AI systems. However, mainstream accelerators like GPUs and TPUs are designed for the high arithmetic intensity of standard ANNs so are not well-suited to SNN simulation. FPGAs are well-suited to applications with low arithmetic intensity as they have high off-chip memory bandwidth and large amounts of on-chip memory. Here, we present a novel RISC-V-based soft vector processor (FeNN), tailored to simulating SNNs on FPGAs. Unlike most dedicated neuromorphic hardware, FeNN is fully programmable and designed to be integrated with applications running on standard computers from the edge to the cloud. We demonstrate that, by using stochastic rounding and saturation, FeNN can achieve high numerical precision with low hardware utilisation and that a single FeNN core can simulate an SNN classifier faster than both an embedded GPU and the Loihi neuromorphic system.
Eventprop training for efficient neuromorphic applications
Mar 06, 2025Neuromorphic computing can reduce the energy requirements of neural networks and holds the promise to `repatriate' AI workloads back from the cloud to the edge. However, training neural networks on neuromorphic hardware has remained elusive. Here, we instead present a pipeline for training spiking neural networks on GPUs, using the efficient event-driven Eventprop algorithm implemented in mlGeNN, and deploying them on Intel's Loihi 2 neuromorphic chip. Our benchmarking on keyword spotting tasks indicates that there is almost no loss in accuracy between GPU and Loihi 2 implementations and that classifying a sample on Loihi 2 is up to 10X faster and uses 200X less energy than on an NVIDIA Jetson Orin Nano.
Efficient Event-based Delay Learning in Spiking Neural Networks
Jan 13, 2025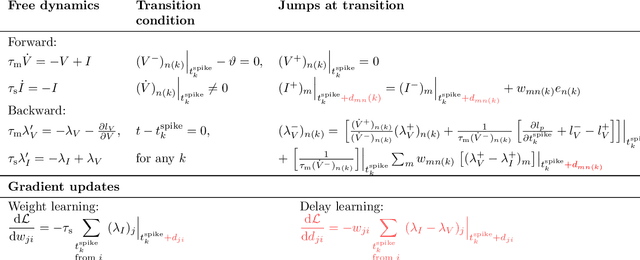
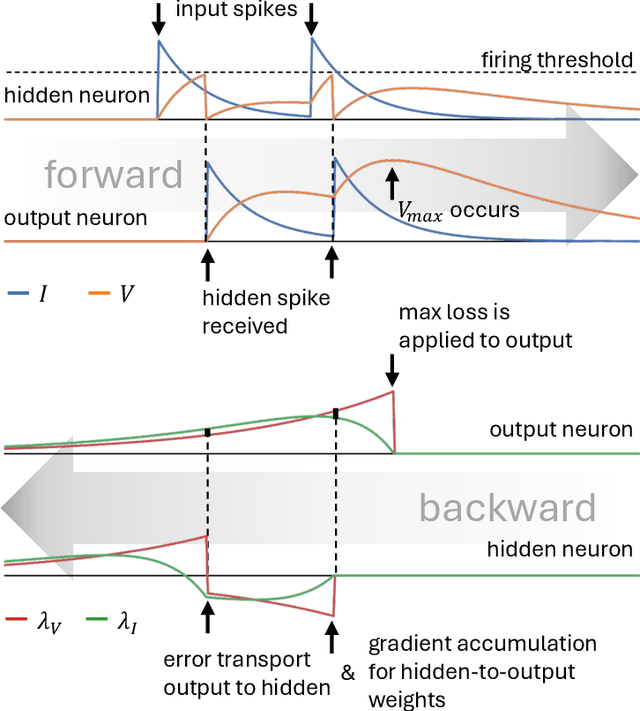
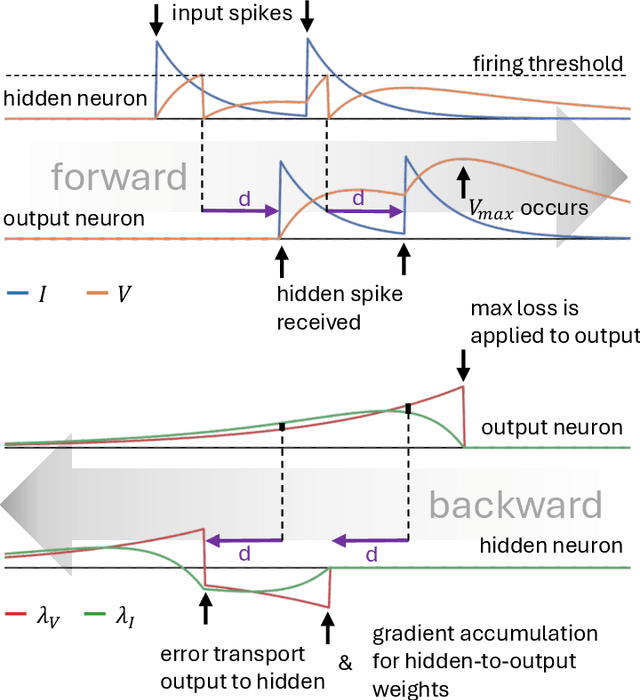
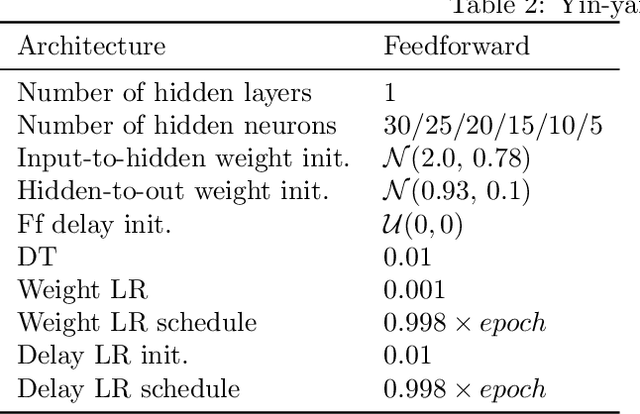
Spiking Neural Networks (SNNs) are attracting increased attention as a more energy-efficient alternative to traditional Artificial Neural Networks. Spiking neurons are stateful and intrinsically recurrent, making them well-suited for spatio-temporal tasks. However, this intrinsic memory is limited by synaptic and membrane time constants. A powerful additional mechanism are delays. In this paper, we propose a novel event-based training method for SNNs with delays, grounded in the EventProp formalism and enabling the calculation of exact gradients with respect to weights and delays. Our method supports multiple spikes per neuron and, to our best knowledge, is the first delay learning method applicable to recurrent connections. We evaluate our method on a simple sequence detection task, and the Yin-Yang, Spiking Heidelberg Digits and Spiking Speech Commands datasets, demonstrating that our algorithm can optimize delays from suboptimal initial conditions and enhance classification accuracy compared to architectures without delays. Finally, we show that our approach uses less than half the memory of the current state-of-the-art delay-learning method and is up to 26x faster.
Spyx: A Library for Just-In-Time Compiled Optimization of Spiking Neural Networks
Feb 29, 2024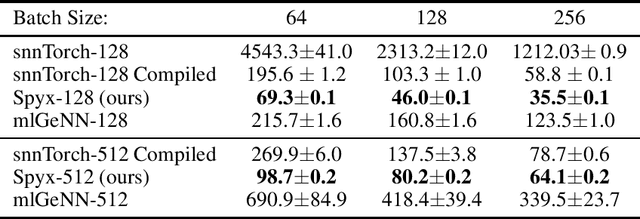

As the role of artificial intelligence becomes increasingly pivotal in modern society, the efficient training and deployment of deep neural networks have emerged as critical areas of focus. Recent advancements in attention-based large neural architectures have spurred the development of AI accelerators, facilitating the training of extensive, multi-billion parameter models. Despite their effectiveness, these powerful networks often incur high execution costs in production environments. Neuromorphic computing, inspired by biological neural processes, offers a promising alternative. By utilizing temporally-sparse computations, Spiking Neural Networks (SNNs) offer to enhance energy efficiency through a reduced and low-power hardware footprint. However, the training of SNNs can be challenging due to their recurrent nature which cannot as easily leverage the massive parallelism of modern AI accelerators. To facilitate the investigation of SNN architectures and dynamics researchers have sought to bridge Python-based deep learning frameworks such as PyTorch or TensorFlow with custom-implemented compute kernels. This paper introduces Spyx, a new and lightweight SNN simulation and optimization library designed in JAX. By pre-staging data in the expansive vRAM of contemporary accelerators and employing extensive JIT compilation, Spyx allows for SNN optimization to be executed as a unified, low-level program on NVIDIA GPUs or Google TPUs. This approach achieves optimal hardware utilization, surpassing the performance of many existing SNN training frameworks while maintaining considerable flexibility.
NeuroBench: Advancing Neuromorphic Computing through Collaborative, Fair and Representative Benchmarking
Apr 15, 2023



The field of neuromorphic computing holds great promise in terms of advancing computing efficiency and capabilities by following brain-inspired principles. However, the rich diversity of techniques employed in neuromorphic research has resulted in a lack of clear standards for benchmarking, hindering effective evaluation of the advantages and strengths of neuromorphic methods compared to traditional deep-learning-based methods. This paper presents a collaborative effort, bringing together members from academia and the industry, to define benchmarks for neuromorphic computing: NeuroBench. The goals of NeuroBench are to be a collaborative, fair, and representative benchmark suite developed by the community, for the community. In this paper, we discuss the challenges associated with benchmarking neuromorphic solutions, and outline the key features of NeuroBench. We believe that NeuroBench will be a significant step towards defining standards that can unify the goals of neuromorphic computing and drive its technological progress. Please visit neurobench.ai for the latest updates on the benchmark tasks and metrics.
Learning efficient backprojections across cortical hierarchies in real time
Dec 20, 2022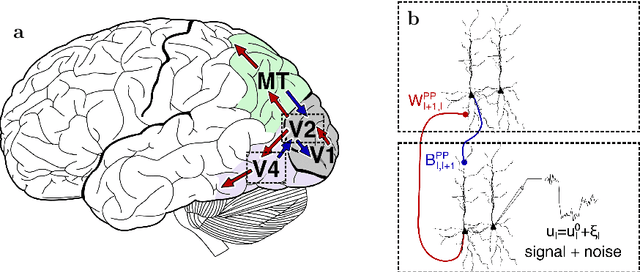
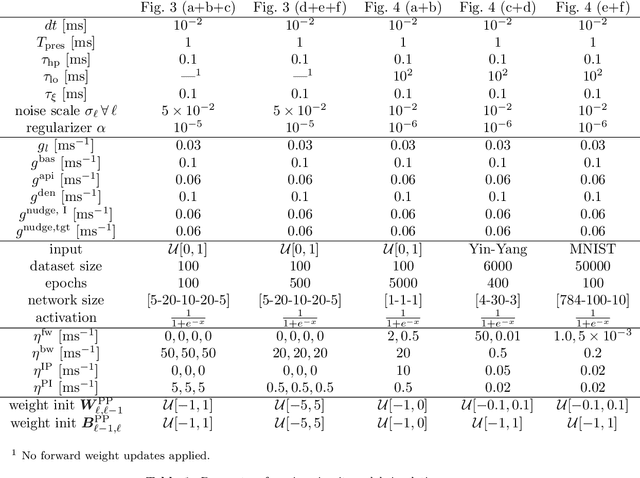
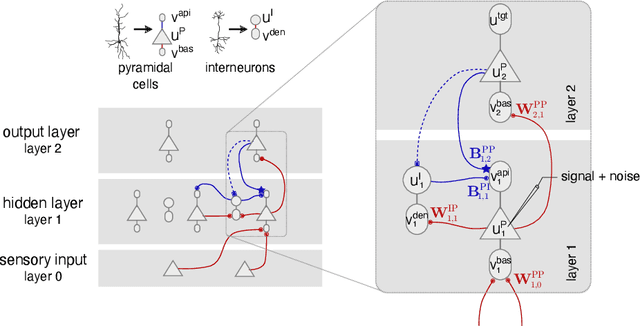
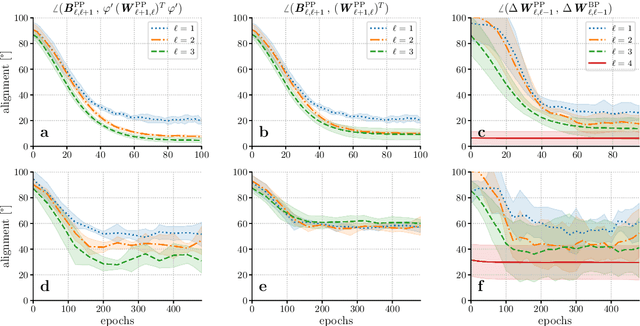
Models of sensory processing and learning in the cortex need to efficiently assign credit to synapses in all areas. In deep learning, a known solution is error backpropagation, which however requires biologically implausible weight transport from feed-forward to feedback paths. We introduce Phaseless Alignment Learning (PAL), a bio-plausible method to learn efficient feedback weights in layered cortical hierarchies. This is achieved by exploiting the noise naturally found in biophysical systems as an additional carrier of information. In our dynamical system, all weights are learned simultaneously with always-on plasticity and using only information locally available to the synapses. Our method is completely phase-free (no forward and backward passes or phased learning) and allows for efficient error propagation across multi-layer cortical hierarchies, while maintaining biologically plausible signal transport and learning. Our method is applicable to a wide class of models and improves on previously known biologically plausible ways of credit assignment: compared to random synaptic feedback, it can solve complex tasks with less neurons and learn more useful latent representations. We demonstrate this on various classification tasks using a cortical microcircuit model with prospective coding.
Loss shaping enhances exact gradient learning with EventProp in Spiking Neural Networks
Dec 02, 2022In a recent paper Wunderlich and Pehle introduced the EventProp algorithm that enables training spiking neural networks by gradient descent on exact gradients. In this paper we present extensions of EventProp to support a wider class of loss functions and an implementation in the GPU enhanced neuronal networks framework which exploits sparsity. The GPU acceleration allows us to test EventProp extensively on more challenging learning benchmarks. We find that EventProp performs well on some tasks but for others there are issues where learning is slow or fails entirely. Here, we analyse these issues in detail and discover that they relate to the use of the exact gradient of the loss function, which by its nature does not provide information about loss changes due to spike creation or spike deletion. Depending on the details of the task and loss function, descending the exact gradient with EventProp can lead to the deletion of important spikes and so to an inadvertent increase of the loss and decrease of classification accuracy and hence a failure to learn. In other situations the lack of knowledge about the benefits of creating additional spikes can lead to a lack of gradient flow into earlier layers, slowing down learning. We eventually present a first glimpse of a solution to these problems in the form of `loss shaping', where we introduce a suitable weighting function into an integral loss to increase gradient flow from the output layer towards earlier layers.
Scalability and Optimization Strategies for GPU Enhanced Neural Networks (GeNN)
Dec 01, 2014
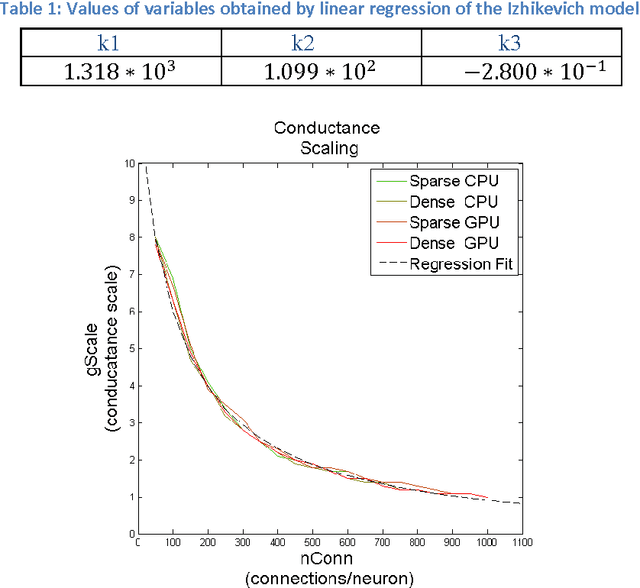

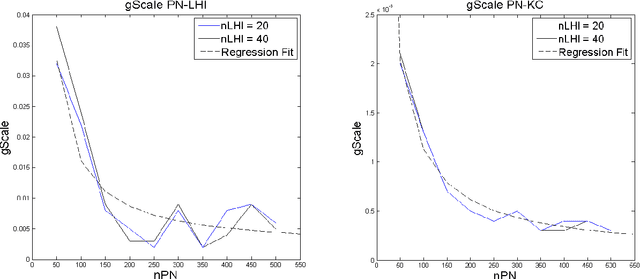
Simulation of spiking neural networks has been traditionally done on high-performance supercomputers or large-scale clusters. Utilizing the parallel nature of neural network computation algorithms, GeNN (GPU Enhanced Neural Network) provides a simulation environment that performs on General Purpose NVIDIA GPUs with a code generation based approach. GeNN allows the users to design and simulate neural networks by specifying the populations of neurons at different stages, their synapse connection densities and the model of individual neurons. In this report we describe work on how to scale synaptic weights based on the configuration of the user-defined network to ensure sufficient spiking and subsequent effective learning. We also discuss optimization strategies particular to GPU computing: sparse representation of synapse connections and occupancy based block-size determination.