 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTree Reconstruction using Topology Optimisation
May 26, 2022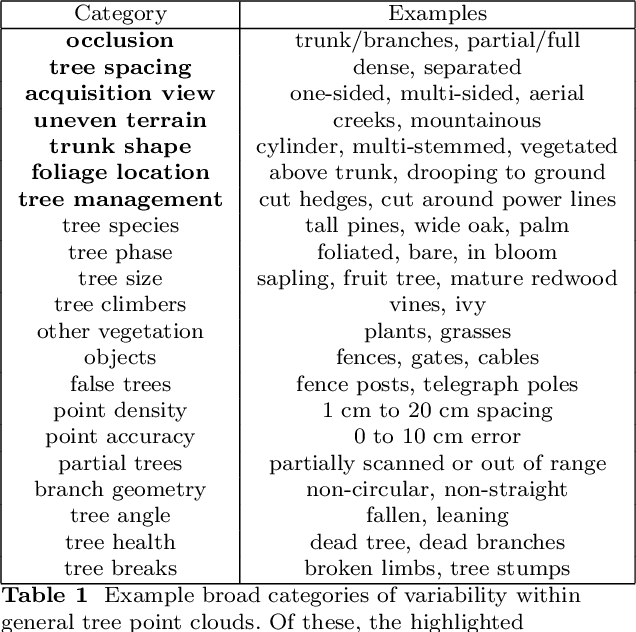
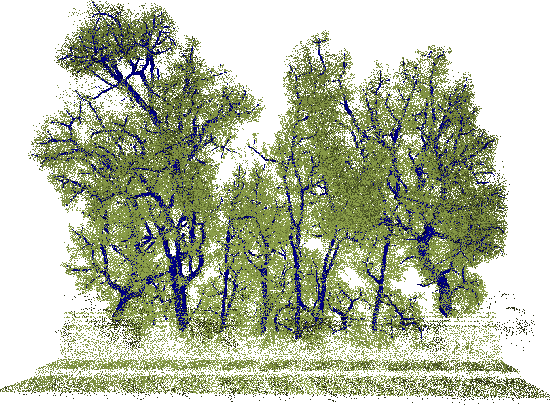
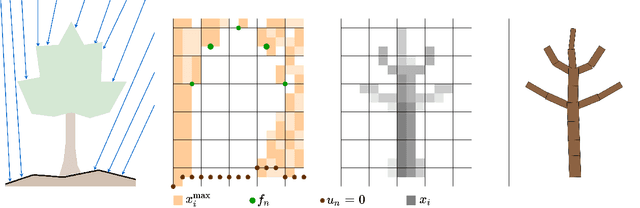
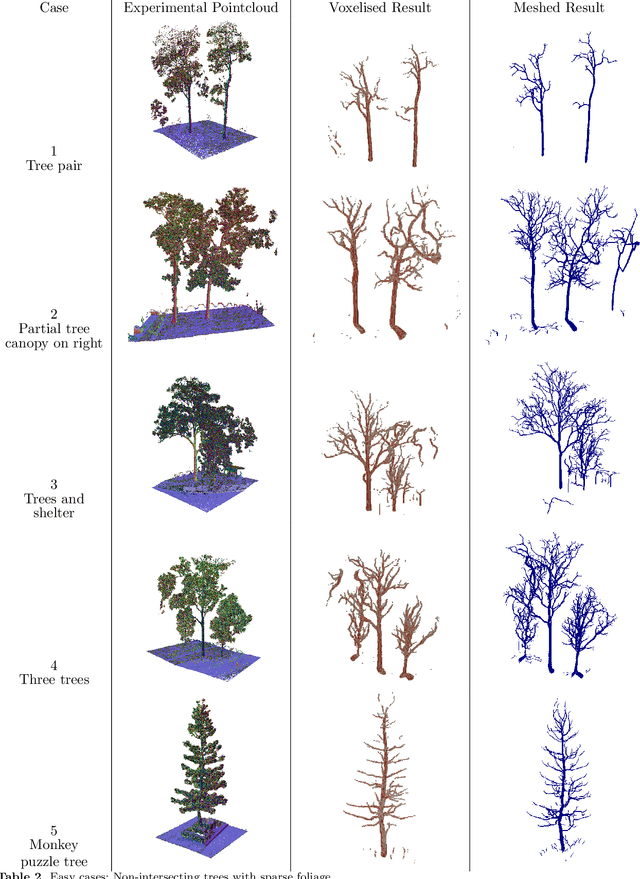
Generating accurate digital tree models from scanned environments is invaluable for forestry, agriculture, and other outdoor industries in tasks such as identifying biomass, fall hazards and traversability, as well as digital applications such as animation and gaming. Existing methods for tree reconstruction rely on feature identification (trunk, crown, etc) to heuristically segment a forest into individual trees and generate a branch structure graph, limiting their application to sparse trees and uniform forests. However, the natural world is a messy place in which trees present with significant heterogeneity and are frequently encroached upon by the surrounding environment. We present a general method for extracting the branch structure of trees from point cloud data, which estimates the structure of trees by adapting the methods of structural topology optimisation to find the optimal material distribution to support wind-loading. We present the results of this optimisation over a wide variety of scans, and discuss the benefits and drawbacks of this novel approach to tree structure reconstruction. Despite the high variability of datasets containing trees, and the high rate of occlusions, our method generates detailed and accurate tree structures in most cases.
Canopy Density Estimation in Perennial Horticulture Crops Using 3D Spinning LiDAR SLAM
Jul 30, 2020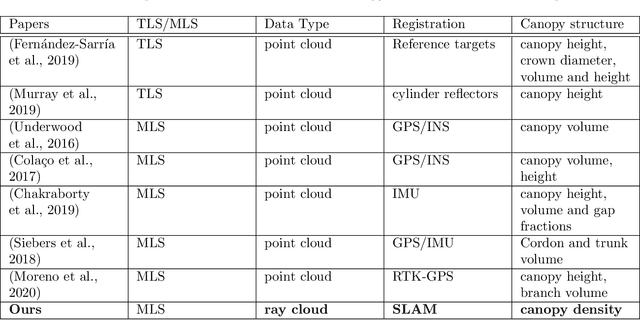
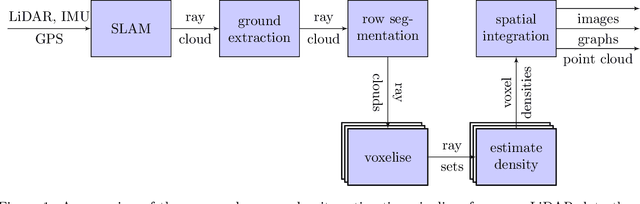
We propose a 3D ray cloud based method for estimating the canopy density of vineyards and orchards that have been scanned by a vehicle-mounted mobile 3D spinning LiDAR (AgScan3D). The method is composed of two parts. Firstly, the AgScan3D data is processed through a Continuous-Time SLAM algorithm into a globally registered 3D ray cloud. The global ray cloud is a canonical data format (a digital twin) from which we can compare vineyard snapshots over multiple times within a season and across seasons. Secondly, the vineyard rows are automatically extracted from the ray cloud and a novel density calculation is performed to estimate the maximum likelihood canopy densities of the vineyard. This combination of digital twinning, together with the accurate extraction of canopy structure information, allows entire vineyards to be analysed and compared, across the growing season and from year to year. The proposed method is evaluated both in simulation and field experiments. Field experiments were performed at four sites, which varied in vineyard structure and vine management, over two growing seasons, resulting in a total traversal of 160 kilometres, 42.4 scanned hectares of vines with a combined total of approximately 93000 of scanned vines. The field datasets and ray cloud library will be released publicly.
Diversity-based Design Assist for Large Legged Robots
Apr 17, 2020



We combine MAP-Elites and highly parallelisable simulation to explore the design space of a class of large legged robots, which stand at around 2m tall and whose design and construction is not well-studied. The simulation is modified to account for factors such as motor torque and weight, and presents a reasonable fidelity search space. A novel robot encoding allows for bio-inspired features such as legs scaling along the length of the body. The impact of three possible control generation schemes are assessed in the context of body-brain co-evolution, showing that even constrained problems benefit strongly from coupling-promoting mechanisms. A two stage process in implemented. In the first stage, a library of possible robots is generated, treating user requirements as constraints. In the second stage, the most promising robot niches are analysed and a suite of human-understandable design rules generated related to the values of their feature variables. These rules, together with the library, are then ready to be used by a (human) robot designer as a Design Assist tool.
OVPC Mesh: 3D Free-space Representation for Local Ground Vehicle Navigation
Nov 26, 2018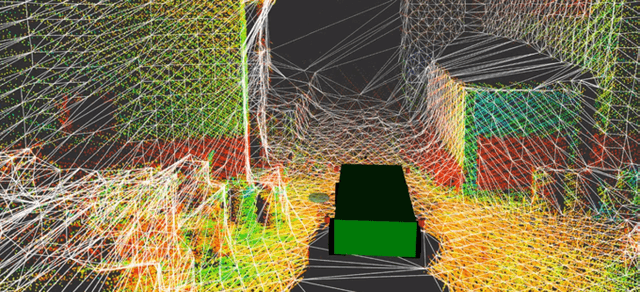
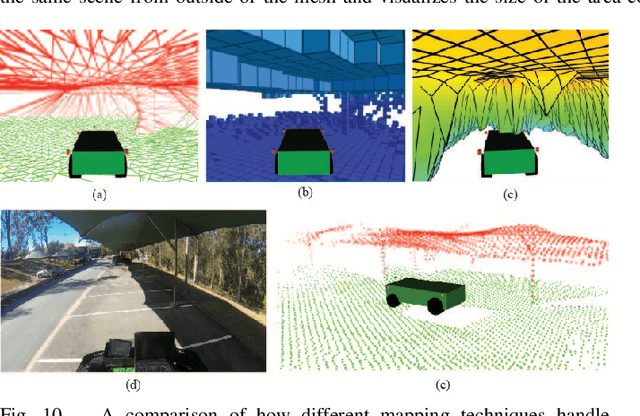
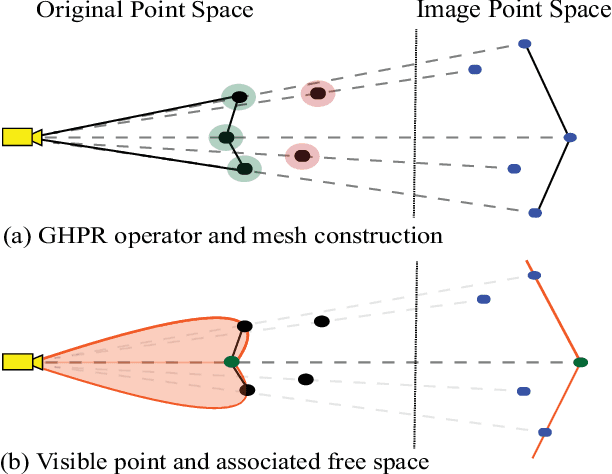
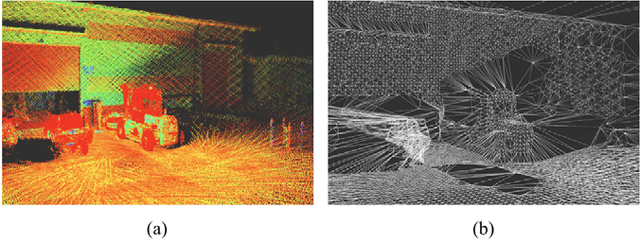
This paper presents a novel approach for local 3D environment representation for autonomous unmanned ground vehicle (UGV) navigation called On Visible Point Clouds Mesh(OVPC Mesh). Our approach represents the surrounding of the robot as a watertight 3D mesh generated from local point cloud data in order to represent the free space surrounding the robot. It is a conservative estimation of the free space and provides a desirable trade-off between representation precision and computational efficiency, without having to discretize the environment into a fixed grid size. Our experiments analyze the usability of the approach for UGV navigation in rough terrain, both in simulation and in a fully integrated real-world system. Additionally, we compare our approach to well-known state-of-the-art solutions, such as Octomap and Elevation Mapping and show that OVPC Mesh can provide reliable 3D information for trajectory planning while fulfilling real-time constraints.