 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForestTrav: Accurate, Efficient and Deployable Forest Traversability Estimation for Autonomous Ground Vehicles
May 22, 2023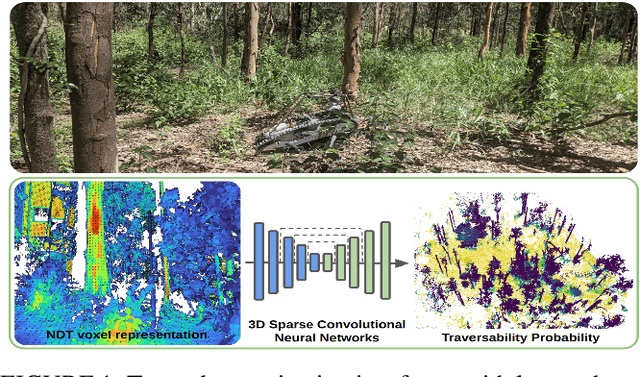
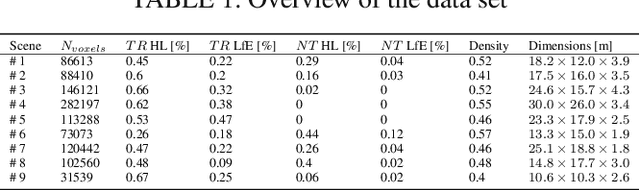
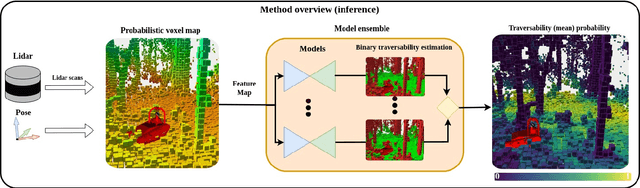
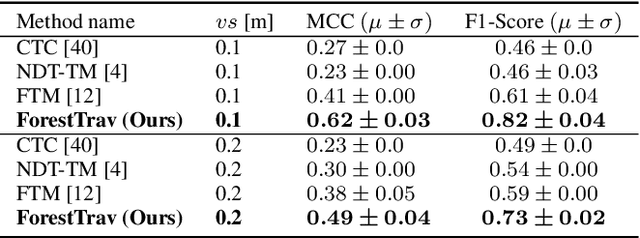
Autonomous navigation in unstructured vegetated environments remains an open challenge. To successfully operate in these settings, ground vehicles must assess the traversability of the environment and determine which vegetation is pliable enough to push through. In this work, we propose a novel method that combines a high-fidelity and feature-rich 3D voxel representation while leveraging the structural context and sparseness of \acfp{SCNN} to assess \ac{TE} in densely vegetated environments. The proposed method is thoroughly evaluated on an accurately-labeled real-world data set that we provide to the community. It is shown to outperform state-of-the-art methods by a significant margin (0.59 vs. 0.39 MCC score at 0.1m voxel resolution) in challenging scenes and to generalize to unseen environments. In addition, the method is economical in the amount of training data and training time required: a model is trained in minutes on a desktop computer. We show that by exploiting the context of the environment, our method can use different feature combinations with only limited performance variations. For example, our approach can be used with lidar-only features, whilst still assessing complex vegetated environments accurately, which was not demonstrated previously in the literature in such environments. In addition, we propose an approach to assess a traversability estimator's sensitivity to information quality and show our method's sensitivity is low.
OVPC Mesh: 3D Free-space Representation for Local Ground Vehicle Navigation
Nov 26, 2018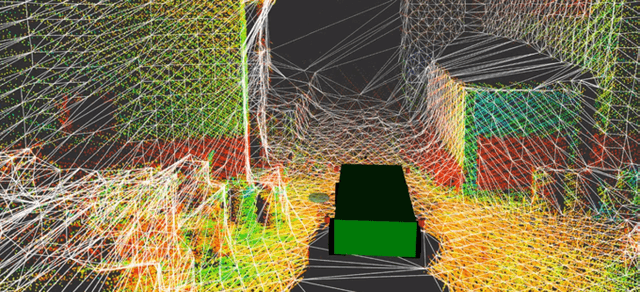
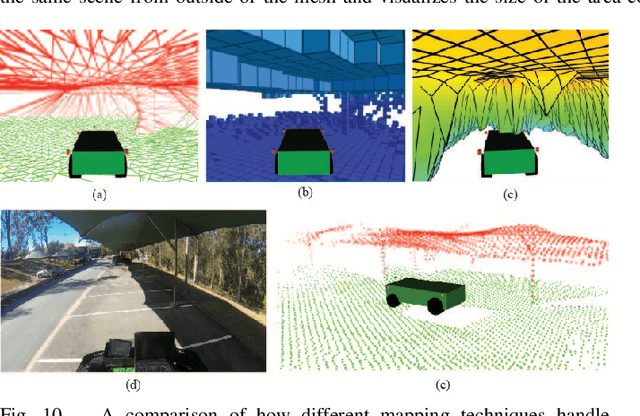
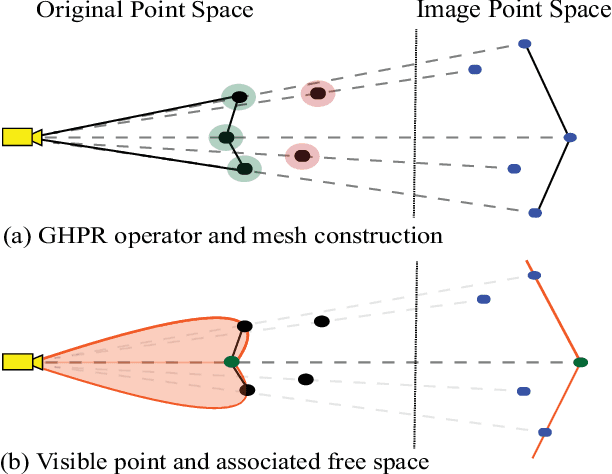
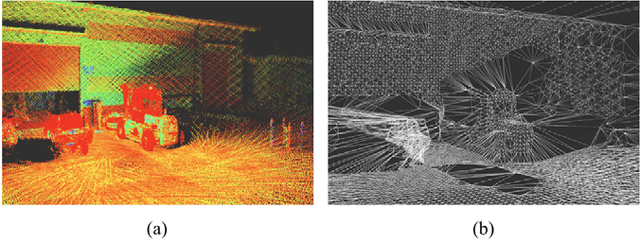
This paper presents a novel approach for local 3D environment representation for autonomous unmanned ground vehicle (UGV) navigation called On Visible Point Clouds Mesh(OVPC Mesh). Our approach represents the surrounding of the robot as a watertight 3D mesh generated from local point cloud data in order to represent the free space surrounding the robot. It is a conservative estimation of the free space and provides a desirable trade-off between representation precision and computational efficiency, without having to discretize the environment into a fixed grid size. Our experiments analyze the usability of the approach for UGV navigation in rough terrain, both in simulation and in a fully integrated real-world system. Additionally, we compare our approach to well-known state-of-the-art solutions, such as Octomap and Elevation Mapping and show that OVPC Mesh can provide reliable 3D information for trajectory planning while fulfilling real-time constraints.