 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Soft Electrostatic Metamaterial Gripper for Multi-surface, Multi-object Adaptation
Mar 10, 2024



One of the trendsetting themes in soft robotics has been the goal of developing the ultimate universal soft robotic gripper. One that is capable of manipulating items of various shapes, sizes, thicknesses, textures, and weights. All the while still being lightweight and scalable in order to adapt to use cases. In this work, we report a soft gripper that enables delicate and precise grasps of fragile, deformable, and flexible objects but also excels in lifting heavy objects of up to 1617x its own body weight. The principle behind the soft gripper is based on extending the capabilities of electroadhesion soft grippers through the enhancement principles found in metamaterial adhesion cut and patterning. This design amplifies the adhesion and grasping payload in one direction while reducing the adhesion capabilities in the other direction. This counteracts the residual forces during peeling (a common problem with electroadhesive grippers), thus increasing its speed of release. In essence, we are able to tune the maximum strength and peeling speed, beyond the capabilities of previous electroadhesive grippers. We study the capabilities of the system through a wide range of experiments with single and multiple-fingered peel tests. We also demonstrate its modular and adaptive capabilities in the real-world with a two-finger gripper, by performing grasping tests of up to $5$ different multi-surfaced objects.
Tree Reconstruction using Topology Optimisation
May 26, 2022
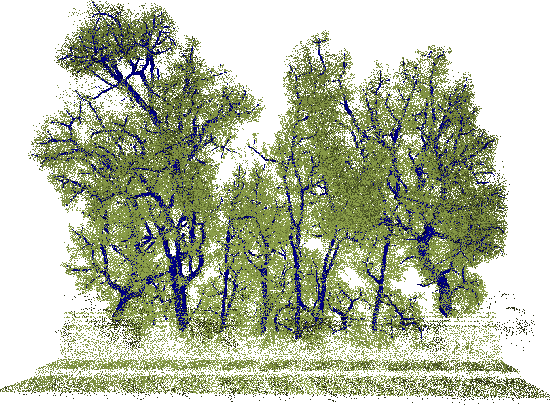
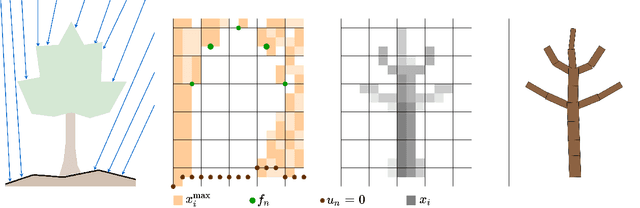
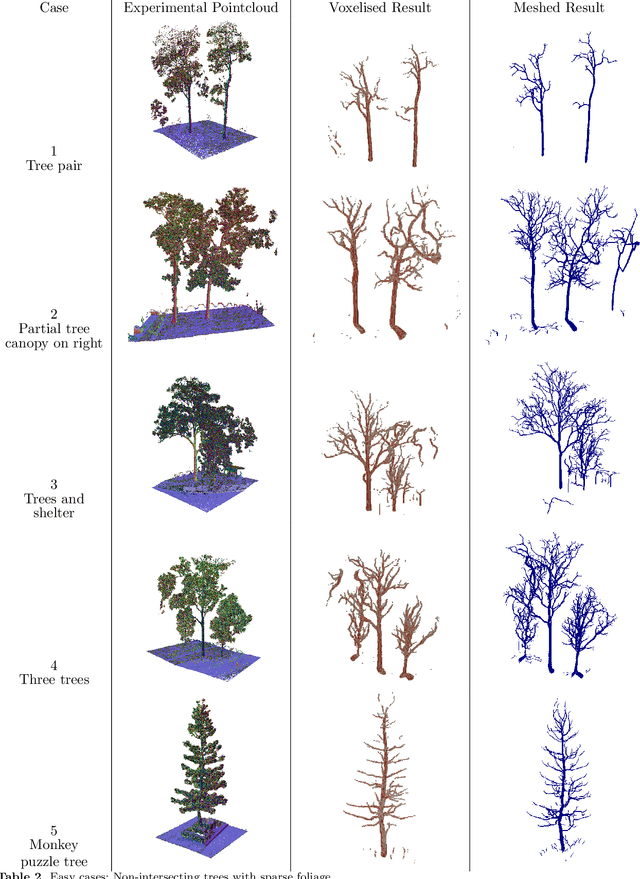
Generating accurate digital tree models from scanned environments is invaluable for forestry, agriculture, and other outdoor industries in tasks such as identifying biomass, fall hazards and traversability, as well as digital applications such as animation and gaming. Existing methods for tree reconstruction rely on feature identification (trunk, crown, etc) to heuristically segment a forest into individual trees and generate a branch structure graph, limiting their application to sparse trees and uniform forests. However, the natural world is a messy place in which trees present with significant heterogeneity and are frequently encroached upon by the surrounding environment. We present a general method for extracting the branch structure of trees from point cloud data, which estimates the structure of trees by adapting the methods of structural topology optimisation to find the optimal material distribution to support wind-loading. We present the results of this optimisation over a wide variety of scans, and discuss the benefits and drawbacks of this novel approach to tree structure reconstruction. Despite the high variability of datasets containing trees, and the high rate of occlusions, our method generates detailed and accurate tree structures in most cases.
Jammkle: Fibre jamming 3D printed multi-material tendons and their application in a robotic ankle
Sep 13, 2021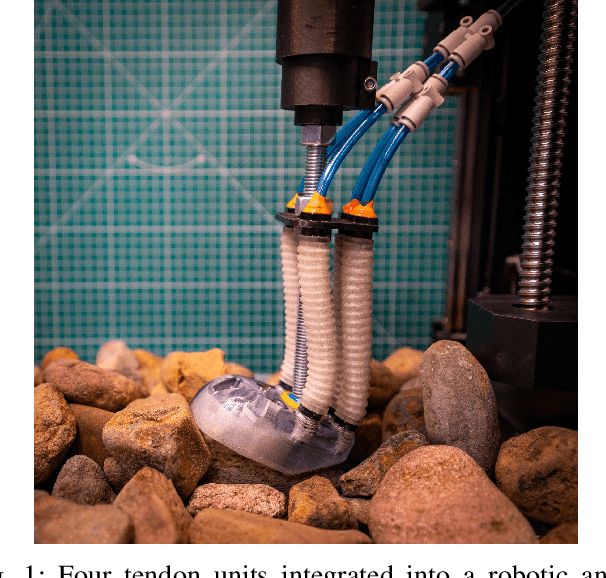
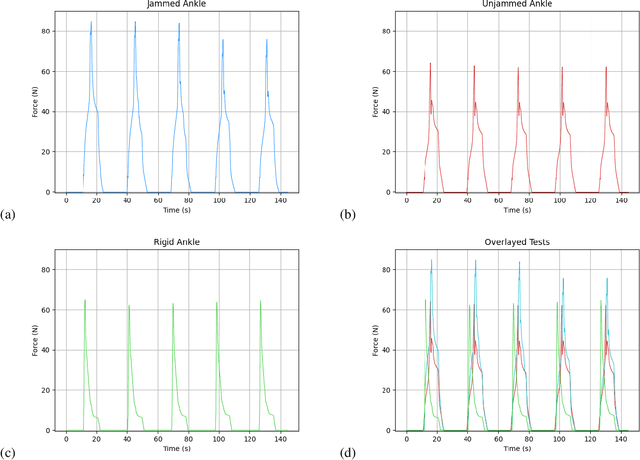
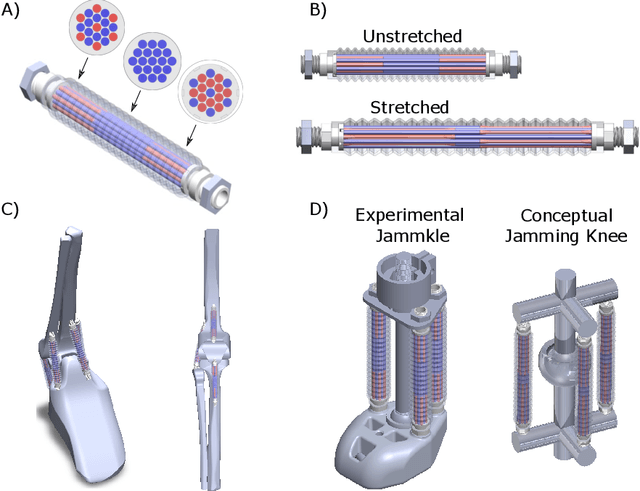

Fibre jamming is a relatively new and understudied soft robotic mechanism that has previously found success when used in stiffness-tuneable arms and fingers. However, to date researchers have not fully taken advantage of the freedom offered by contemporary fabrication techniques including multi-material 3D printing in the creation of fibre jamming structures. In this research, we present a novel, modular, multi-material, 3D printed, fibre jamming tendon unit for use in a stiffness-tuneable compliant robotic ankle, or Jammkle. We describe the design and fabrication of the Jammkle and highlight its advantages compared to examples from modern literature. We develop a multiphysics model of the tendon unit, showing good agreement with experimental data. Finally, we demonstrate a practical application by integrating multiple tendon units into a robotic ankle and perform extensive testing and characterisation. We show that the Jammkle outperforms comparative leg structures in terms of compliance, damping, and slip prevention.