 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Soft Electrostatic Metamaterial Gripper for Multi-surface, Multi-object Adaptation
Mar 10, 2024



One of the trendsetting themes in soft robotics has been the goal of developing the ultimate universal soft robotic gripper. One that is capable of manipulating items of various shapes, sizes, thicknesses, textures, and weights. All the while still being lightweight and scalable in order to adapt to use cases. In this work, we report a soft gripper that enables delicate and precise grasps of fragile, deformable, and flexible objects but also excels in lifting heavy objects of up to 1617x its own body weight. The principle behind the soft gripper is based on extending the capabilities of electroadhesion soft grippers through the enhancement principles found in metamaterial adhesion cut and patterning. This design amplifies the adhesion and grasping payload in one direction while reducing the adhesion capabilities in the other direction. This counteracts the residual forces during peeling (a common problem with electroadhesive grippers), thus increasing its speed of release. In essence, we are able to tune the maximum strength and peeling speed, beyond the capabilities of previous electroadhesive grippers. We study the capabilities of the system through a wide range of experiments with single and multiple-fingered peel tests. We also demonstrate its modular and adaptive capabilities in the real-world with a two-finger gripper, by performing grasping tests of up to $5$ different multi-surfaced objects.
Suction-based Soft Robotic Gripping of Rough and Irregular Parts
Sep 17, 2020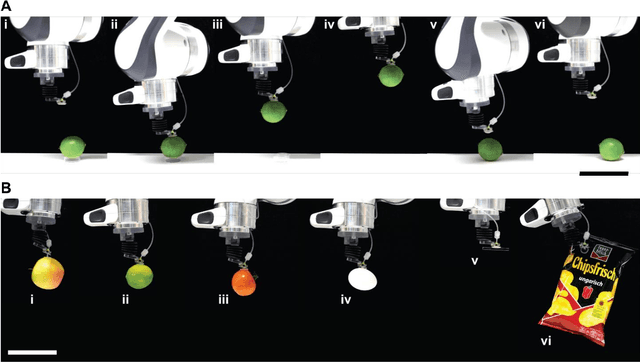

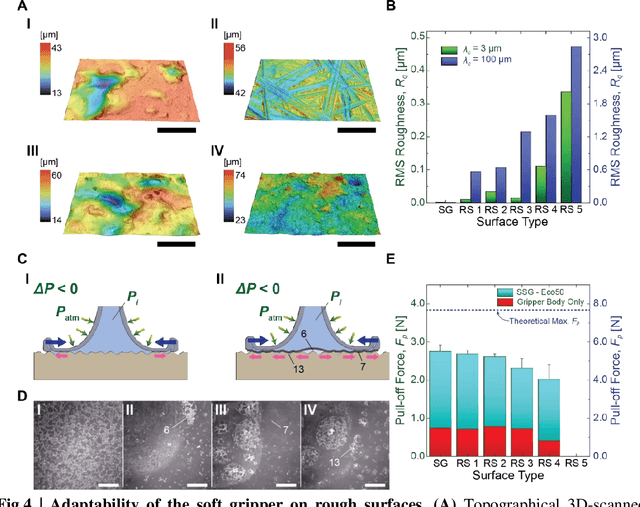
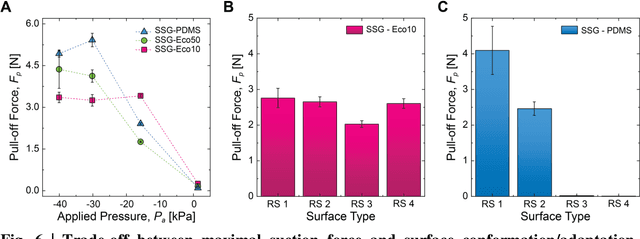
Recently, suction-based robotic systems with microscopic features or active suction components have been proposed to grip rough and irregular surfaces. However, sophisticated fabrication methods or complex control systems are required for such systems, and robust attachment to rough real-world surfaces still remains a grand challenge. Here, we propose a fully soft robotic gripper, where a flat elastic membrane is used to conform and contact parts or surfaces well, where an internal negative pressure exerted on the air-sealed membrane induces the suction-based gripping. 3D printing in combination with soft molding techniques enable the fabrication of the soft gripper. Robust attachment to complex 3D and rough surfaces is enabled by the surface-conformable soft flat membrane, which generates strong and robust suction at the contact interface. Such robust attachment to rough and irregular surfaces enables manipulation of a broad range of real-world objects, such as an egg, lime, and foiled package, without any physical damage. Compared to the conventional suction cup designs, the proposed suction gripper design shows a four-fold increase in gripping performance on rough surfaces. Furthermore, the structural and material simplicity of the proposed gripper architecture facilitates its system-level integration with other soft robotic peripherals, which can enable broader impact in diverse fields, such as digital manufacturing, robotic manipulation, and medical gripping applications.