 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiversity-based Design Assist for Large Legged Robots
Apr 17, 2020



We combine MAP-Elites and highly parallelisable simulation to explore the design space of a class of large legged robots, which stand at around 2m tall and whose design and construction is not well-studied. The simulation is modified to account for factors such as motor torque and weight, and presents a reasonable fidelity search space. A novel robot encoding allows for bio-inspired features such as legs scaling along the length of the body. The impact of three possible control generation schemes are assessed in the context of body-brain co-evolution, showing that even constrained problems benefit strongly from coupling-promoting mechanisms. A two stage process in implemented. In the first stage, a library of possible robots is generated, treating user requirements as constraints. In the second stage, the most promising robot niches are analysed and a suite of human-understandable design rules generated related to the values of their feature variables. These rules, together with the library, are then ready to be used by a (human) robot designer as a Design Assist tool.
Towards the Targeted Environment-Specific Evolution of Robot Components
Oct 11, 2018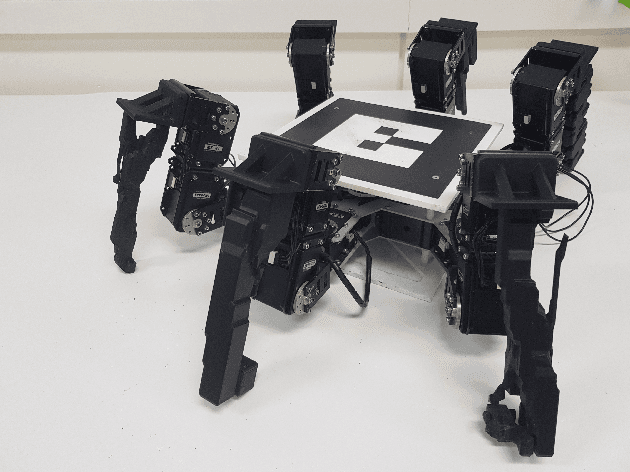



This research considers the task of evolving the physical structure of a robot to enhance its performance in various environments, which is a significant problem in the field of Evolutionary Robotics. Inspired by the fields of evolutionary art and sculpture, we evolve only targeted parts of a robot, which simplifies the optimisation problem compared to traditional approaches that must simultaneously evolve both (actuated) body and brain. Exploration fidelity is emphasised in areas of the robot most likely to benefit from shape optimisation, whilst exploiting existing robot structure and control. Our approach uses a Genetic Algorithm to optimise collections of Bezier splines that together define the shape of a legged robot's tibia, and leg performance is evaluated in parallel in a high-fidelity simulator. The leg is represented in the simulator as 3D-printable file, and as such can be readily instantiated in reality. Provisional experiments in three distinct environments show the evolution of environment-specific leg structures that are both high-performing and notably different to those evolved in the other environments. This proof-of-concept represents an important step towards the environment-dependent optimisation of performance-critical components for a range of ubiquitous, standard, and already-capable robots that can carry out a wide variety of tasks.