 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Patched Grid Mapping
Aug 07, 2023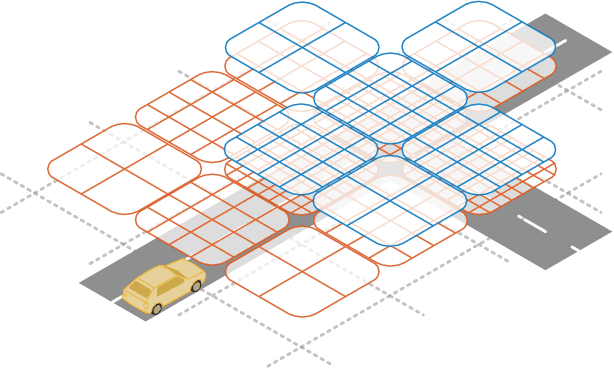
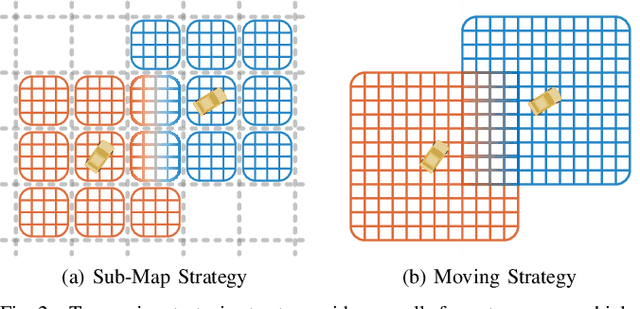
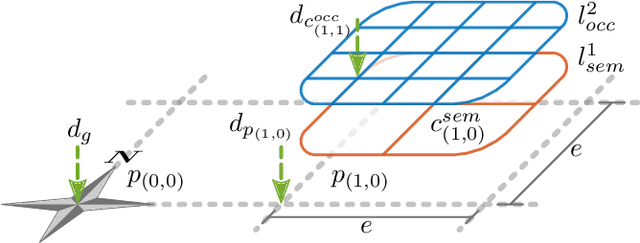
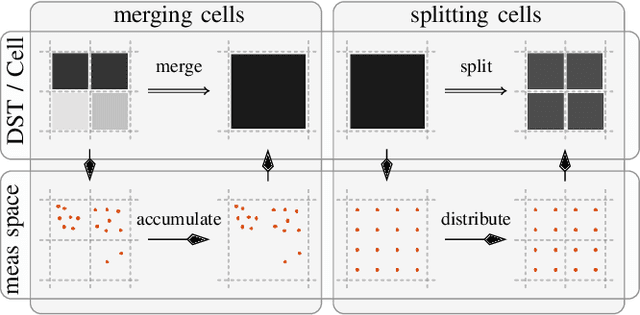
In this work, we propose a novel adaptive grid mapping approach, the Adaptive Patched Grid Map, which enables a situational aware grid based perception for autonomous vehicles. Its structure allows a flexible representation of the surrounding unstructured environment. By splitting types of information into separate layers less memory is allocated when data is unevenly or sporadically available. However, layers must be resampled during the fusion process to cope with dynamically changing cell sizes. Therefore, we propose a novel spatial cell fusion approach. Together with the proposed fusion framework, dynamically changing external requirements, such as cell resolution specifications and horizon targets, are considered. For our evaluation, real-world data were recorded from an autonomous vehicle driving through various traffic situations. Based on this, the memory efficiency is compared to other approaches, and fusion execution times are determined. The results confirm the adaptation to requirement changes and a significant memory usage reduction.
Self-Assessment for Single-Object Tracking in Clutter Using Subjective Logic
Jun 15, 2022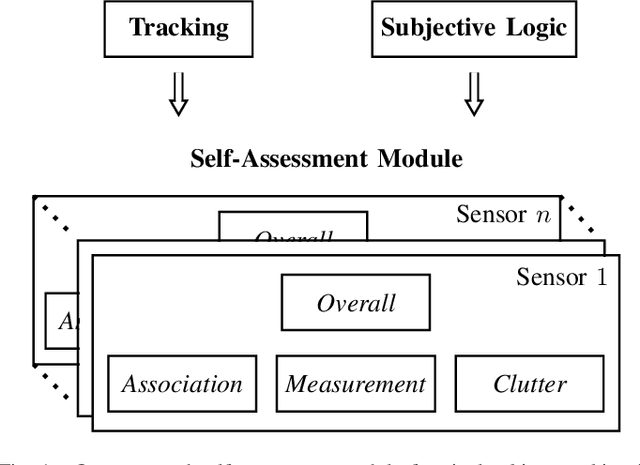
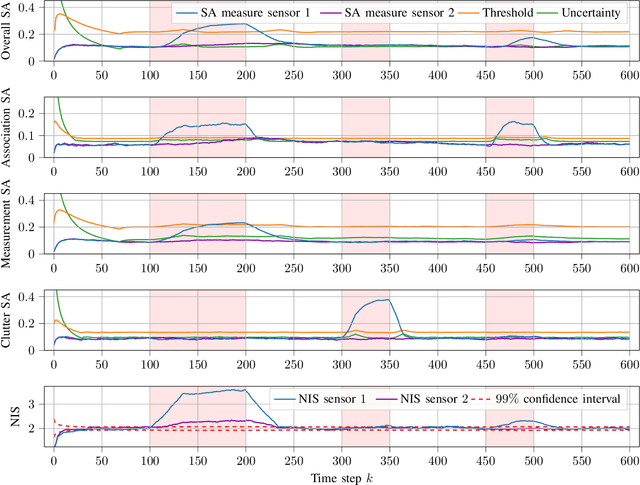
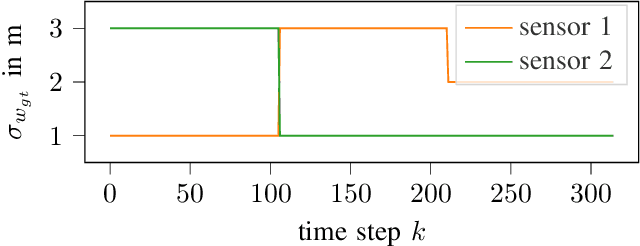
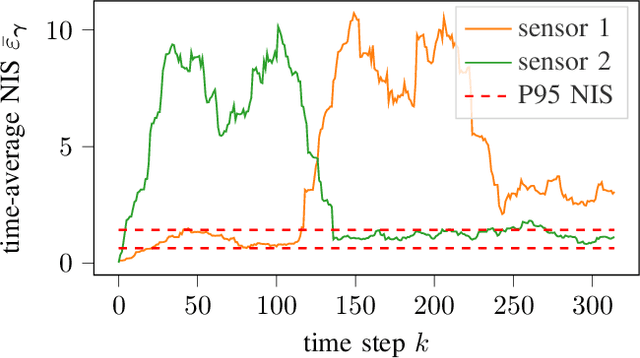
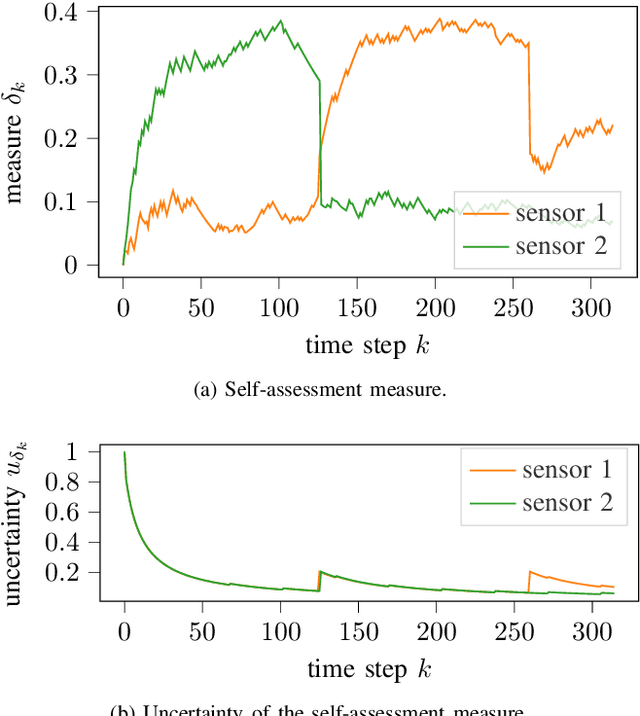
Reliable tracking algorithms are essential for automated driving. However, the existing consistency measures are not sufficient to meet the increasing safety demands in the automotive sector. Therefore, this work presents a novel method for self-assessment of single-object tracking in clutter based on Kalman filtering and subjective logic. A key feature of the approach is that it additionally provides a measure of the collected statistical evidence in its online reliability scores. In this way, various aspects of reliability, such as the correctness of the assumed measurement noise, detection probability, and clutter rate, can be monitored in addition to the overall assessment based on the available evidence. Here, we present a mathematical derivation of the reference distribution used in our self-assessment module for our studied problem. Moreover, we introduce a formula that describes how a threshold should be chosen for the degree of conflict, the subjective logic comparison measure used for the reliability decision making. Our approach is evaluated in a challenging simulation scenario designed to model adverse weather conditions. The simulations show that our method can significantly improve the reliability checking of single-object tracking in clutter in several aspects.
Anomaly Detection in Radar Data Using PointNets
Sep 20, 2021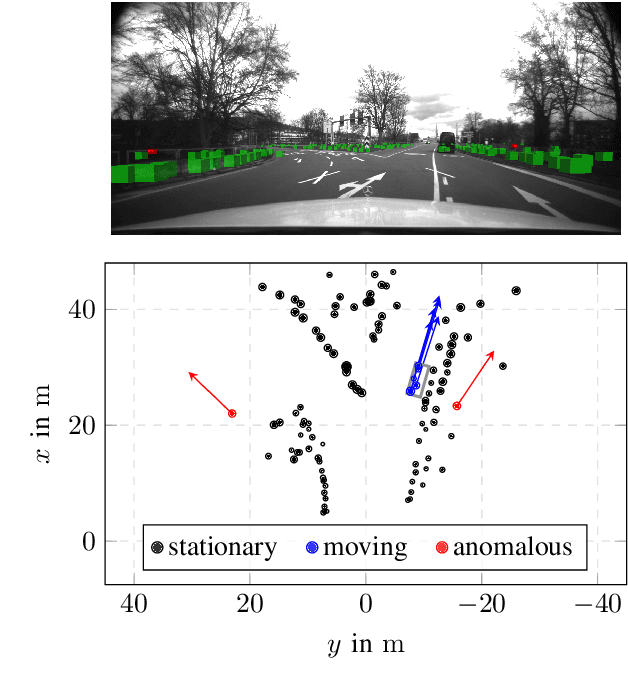
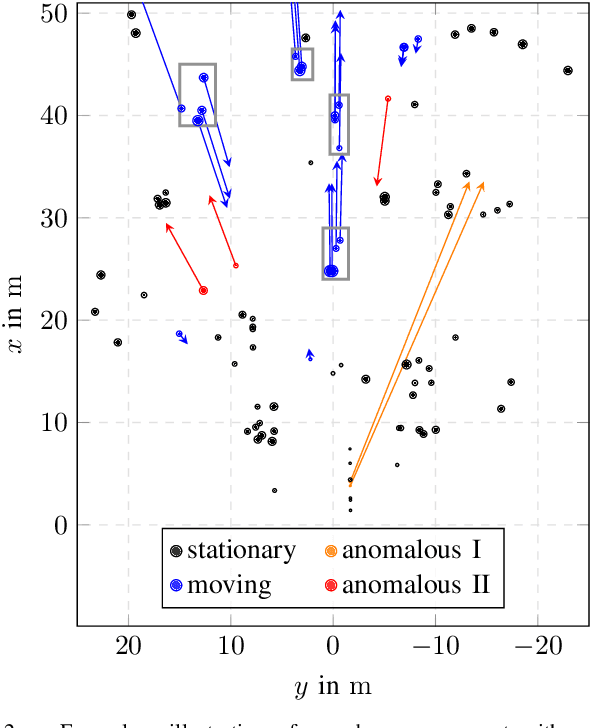
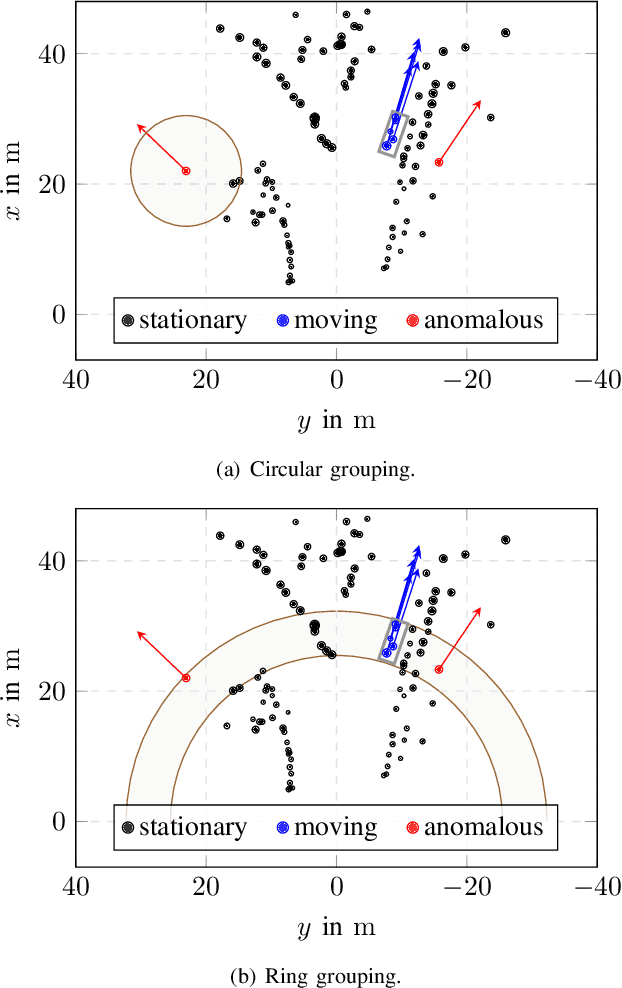

For autonomous driving, radar is an important sensor type. On the one hand, radar offers a direct measurement of the radial velocity of targets in the environment. On the other hand, in literature, radar sensors are known for their robustness against several kinds of adverse weather conditions. However, on the downside, radar is susceptible to ghost targets or clutter which can be caused by several different causes, e.g., reflective surfaces in the environment. Ghost targets, for instance, can result in erroneous object detections. To this end, it is desirable to identify anomalous targets as early as possible in radar data. In this work, we present an approach based on PointNets to detect anomalous radar targets. Modifying the PointNet-architecture driven by our task, we developed a novel grouping variant which contributes to a multi-form grouping module. Our method is evaluated on a real-world dataset in urban scenarios and shows promising results for the detection of anomalous radar targets.
Kalman Filter Meets Subjective Logic: A Self-Assessing Kalman Filter Using Subjective Logic
Jul 01, 2020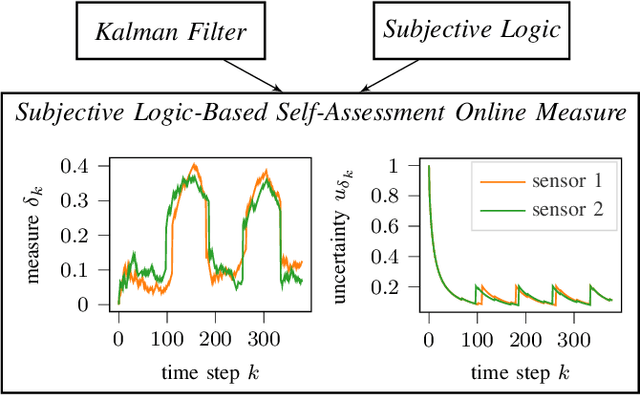
Self-assessment is a key to safety and robustness in automated driving. In order to design safer and more robust automated driving functions, the goal is to self-assess the performance of each module in a whole automated driving system. One crucial component in automated driving systems is the tracking of surrounding objects, where the Kalman filter is the most fundamental tracking algorithm. For Kalman filters, some classical online consistency measures exist for self-assessment, which are based on classical probability theory. However, these classical approaches lack the ability to measure the explicit statistical uncertainty within the self-assessment, which is an important quality measure, particularly, if only a small number of samples is available for the self-assessment. In this work, we propose a novel online self-assessment method using subjective logic, which is a modern extension of probabilistic logic that explicitly models the statistical uncertainty. Thus, by embedding classical Kalman filtering into subjective logic, our method additionally features an explicit measure for statistical uncertainty in the self-assessment.
2D Car Detection in Radar Data with PointNets
Apr 17, 2019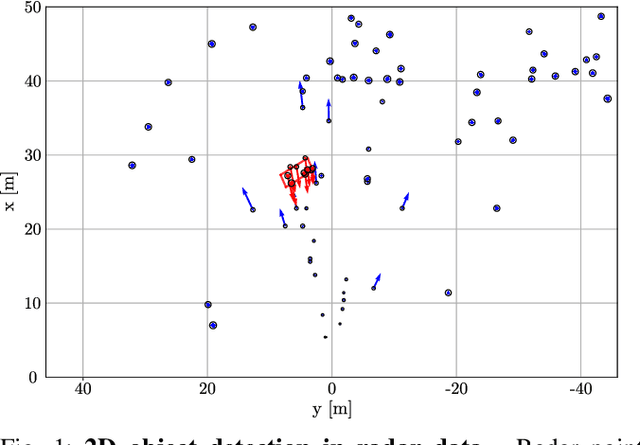
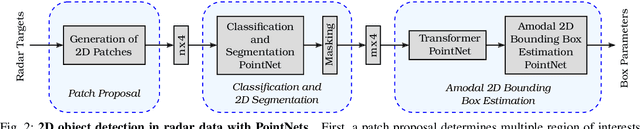


For many automated driving functions, a highly accurate perception of the vehicle environment is a crucial prerequisite. Modern high-resolution radar sensors generate multiple radar targets per object, which makes these sensors particularly suitable for the 2D object detection task. This work presents an approach to detect object hypotheses solely depending on sparse radar data using PointNets. In literature, only methods are presented so far which perform either object classification or bounding box estimation for objects. In contrast, this method facilitates a classification together with a bounding box estimation of objects using a single radar sensor. To this end, PointNets are adjusted for radar data performing 2D object classification with segmentation, and 2D bounding box regression in order to estimate an amodal bounding box. The algorithm is evaluated using an automatically created dataset which consist of various realistic driving maneuvers. The results show the great potential of object detection in high-resolution radar data using PointNets.