 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2D Car Detection in Radar Data with PointNets
Apr 17, 2019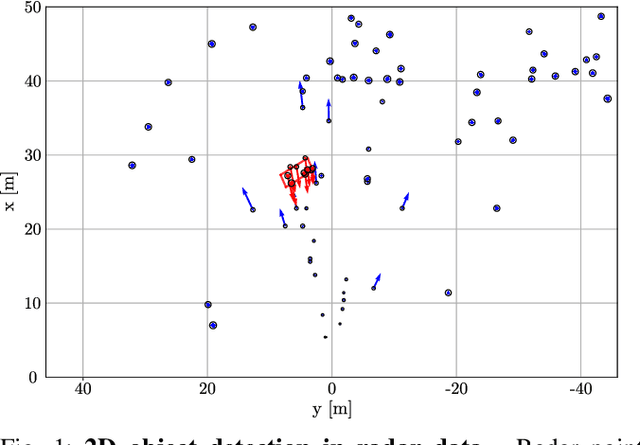
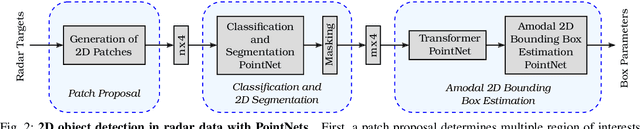


For many automated driving functions, a highly accurate perception of the vehicle environment is a crucial prerequisite. Modern high-resolution radar sensors generate multiple radar targets per object, which makes these sensors particularly suitable for the 2D object detection task. This work presents an approach to detect object hypotheses solely depending on sparse radar data using PointNets. In literature, only methods are presented so far which perform either object classification or bounding box estimation for objects. In contrast, this method facilitates a classification together with a bounding box estimation of objects using a single radar sensor. To this end, PointNets are adjusted for radar data performing 2D object classification with segmentation, and 2D bounding box regression in order to estimate an amodal bounding box. The algorithm is evaluated using an automatically created dataset which consist of various realistic driving maneuvers. The results show the great potential of object detection in high-resolution radar data using PointNets.
Environment Perception Framework Fusing Multi-Object Tracking, Dynamic Occupancy Grid Maps and Digital Maps
Dec 20, 2018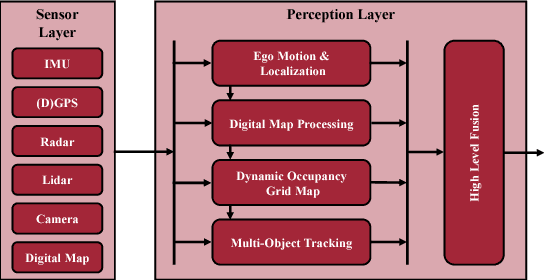
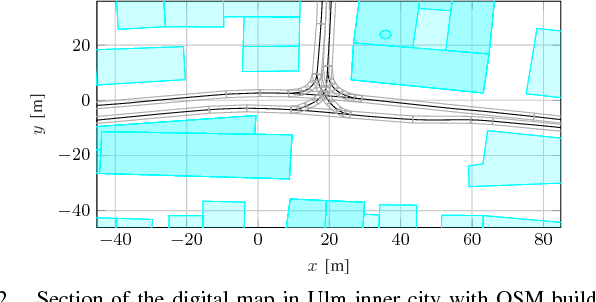
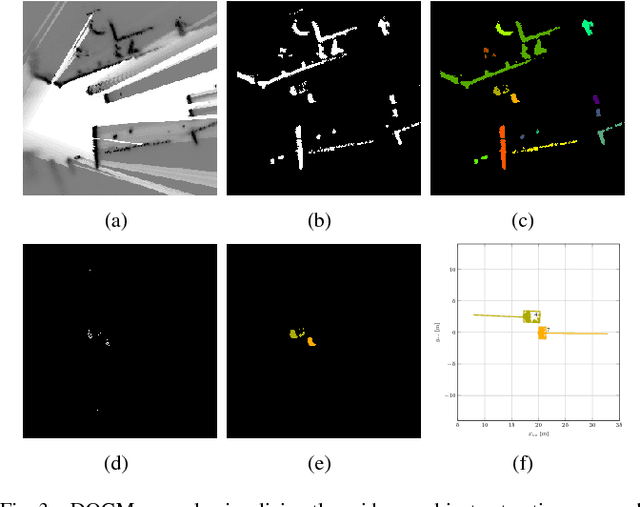
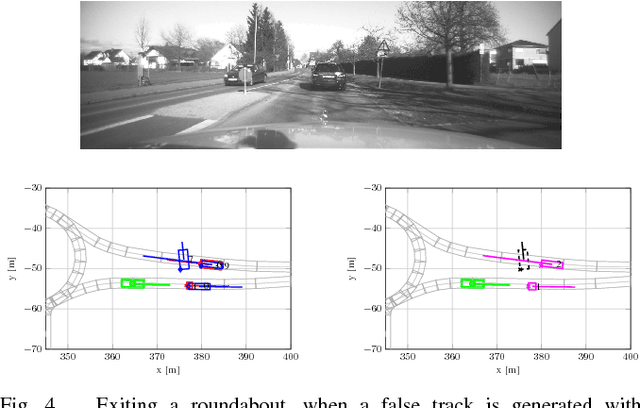
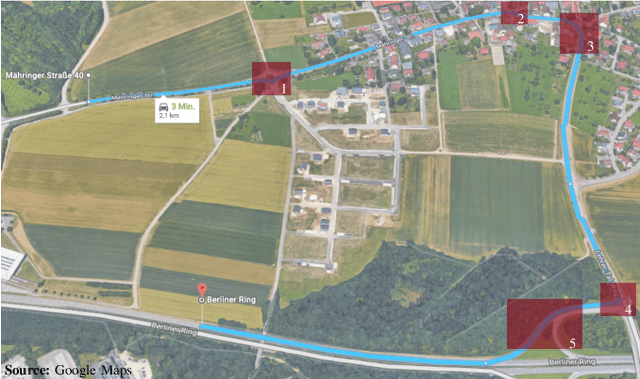
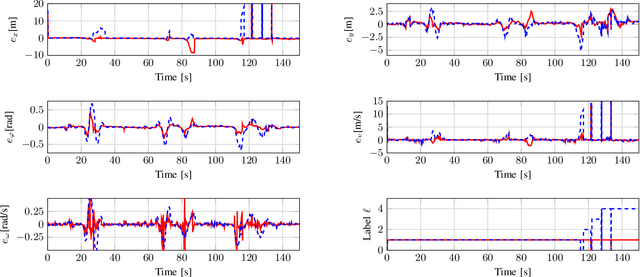
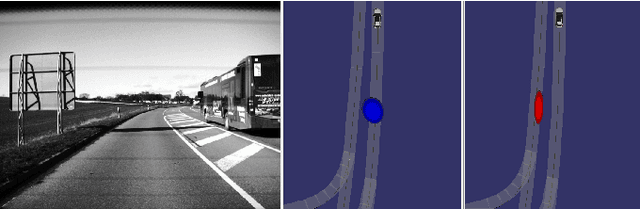
Autonomously driving vehicles require a complete and robust perception of the local environment. A main challenge is to perceive any other road users, where multi-object tracking or occupancy grid maps are commonly used. The presented approach combines both methods to compensate false positives and receive a complementary environment perception. Therefore, an environment perception framework is introduced that defines a common representation, extracts objects from a dynamic occupancy grid map and fuses them with tracks of a Labeled Multi-Bernoulli filter. Finally, a confidence value is developed, that validates object estimates using different constraints regarding physical possibilities, method specific characteristics and contextual information from a digital map. Experimental results with real world data highlight the robustness and significance of the presented fusing approach, utilizing the confidence value in rural and urban scenarios.
Multi-Object Tracking with Interacting Vehicles and Road Map Information
Dec 20, 2018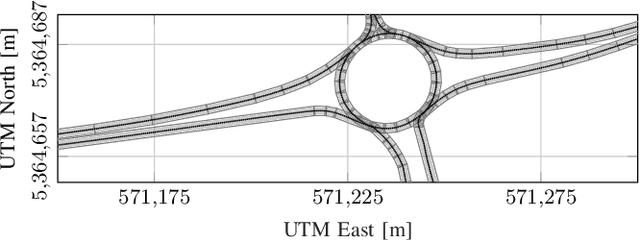
In many applications, tracking of multiple objects is crucial for a perception of the current environment. Most of the present multi-object tracking algorithms assume that objects move independently regarding other dynamic objects as well as the static environment. Since in many traffic situations objects interact with each other and in addition there are restrictions due to drivable areas, the assumption of an independent object motion is not fulfilled. This paper proposes an approach adapting a multi-object tracking system to model interaction between vehicles, and the current road geometry. Therefore, the prediction step of a Labeled Multi-Bernoulli filter is extended to facilitate modeling interaction between objects using the Intelligent Driver Model. Furthermore, to consider road map information, an approximation of a highly precise road map is used. The results show that in scenarios where the assumption of a standard motion model is violated, the tracking system adapted with the proposed method achieves higher accuracy and robustness in its track estimations.